When I launched the Docker container, isaac_manipulator_pick_and_place was not available in ros2 launch.
So when I tried to build the isaac_manipulator_pick_and_place package in Docker, the following error occurred.
admin@robot:/workspaces/isaac_ros-dev$ colcon build --symlink-install --packages-up-to isaac_manipulator_pick_and_place
[0.582s] WARNING:colcon.colcon_core.package_selection:Some selected packages are already built in one or more underlay workspaces:
'isaac_ros_launch_utils' is in: /opt/ros/humble
'isaac_ros_test_cmake' is in: /opt/ros/humble
'isaac_ros_common' is in: /opt/ros/humble
If a package in a merged underlay workspace is overridden and it installs headers, then all packages in the overlay must sort their include directories by workspace order. Failure to do so may result in build failures or undefined behavior at run time.
If the overridden package is used by another package in any underlay, then the overriding package in the overlay must be API and ABI compatible or undefined behavior at run time may occur.
If you understand the risks and want to override a package anyways, add the following to the command line:
--allow-overriding isaac_ros_common isaac_ros_launch_utils isaac_ros_test_cmake
This may be promoted to an error in a future release of colcon-override-check.
Starting >>> isaac_ros_common
Starting >>> robotiq_controllers
Starting >>> robotiq_description
--- stderr: robotiq_description
CMake Error: The current CMakeCache.txt directory /workspaces/isaac_ros-dev/build/robotiq_description/CMakeCache.txt is different than the directory /home/shimizke/workspaces/isaac_ros-dev/build/robotiq_description where CMakeCache.txt was created. This may result in binaries being created in the wrong place. If you are not sure, reedit the CMakeCache.txt
CMake Error: The source "/workspaces/isaac_ros-dev/src/ros2_robotiq_gripper/robotiq_description/CMakeLists.txt" does not match the source "/home/shimizke/workspaces/isaac_ros-dev/src/ros2_robotiq_gripper/robotiq_description/CMakeLists.txt" used to generate cache. Re-run cmake with a different source directory.
---
Failed <<< robotiq_description [0.04s, exited with code 1]
Aborted <<< robotiq_controllers [0.05s]
Aborted <<< isaac_ros_common [0.93s]
Summary: 0 packages finished [1.43s]
1 package failed: robotiq_description
2 packages aborted: isaac_ros_common robotiq_controllers
3 packages had stderr output: isaac_ros_common robotiq_controllers robotiq_description
7 packages not processed
If you want to try Isaac ROS 3.2 demo, your CUDA needs to be upgraded to CUDA 12.6+.
If your workspace and setup are for earlier Isaac ROS version. Please cleanup the Isaac ROS workspace. Then follow Isaac ROS 3.2 document to setup docker and download source again.
I followed the tutorial to install everything, but when running colcon build --symlink-install --packages-up-to isaac_manipulator_bringup, the following log appears.
Then, when I run the command: ros2 launch isaac_manipulator_pick_and_place isaac_sim_workflows.launch.py workflow_type:=pick_and_place object_attachment_type:=sphere use_pose_from_rviz:=True
It shows the message: Package ‘isaac_manipulator_pick_and_place’ not found: "package ‘isaac_manipulator_pick_and_place’ not found
When running colcon build --symlink-install --packages-up-to isaac_manipulator_bringup, the following log appears. Has anyone else encountered the same issue and managed to solve it ?
Even if I switch to Installation from Debian, when I run ros2 launch isaac_manipulator_pick_and_place isaac_sim_workflows.launch.py workflow_type:=pick_and_place object_attachment_type:=sphere use_pose_from_rviz:=True, I still get the error: Package 'isaac_manipulator_pick_and_place' not found: package 'isaac_manipulator_pick_and_place' not found, searching: ['/opt/ros/humble'].
I have recorded the complete log after running colcon build --symlink-install --packages-up-to isaac_manipulator_bringup, and I hope you can help me troubleshoot the errors.
admin@pu9730962:/workspaces/isaac_ros-dev$ colcon build --symlink-install --packages-up-to isaac_manipulator_pick_and_place
[0.367s] WARNING:colcon.colcon_core.package_selection:Some selected packages are already built in one or more underlay workspaces:
'isaac_ros_test' is in: /opt/ros/humble
'moveit_task_constructor_core' is in: /opt/ros/humble
'isaac_ros_launch_utils' is in: /opt/ros/humble
'isaac_ros_common' is in: /opt/ros/humble
'moveit_task_constructor_msgs' is in: /opt/ros/humble
If a package in a merged underlay workspace is overridden and it installs headers, then all packages in the overlay must sort their include directories by workspace order. Failure to do so may result in build failures or undefined behavior at run time.
If the overridden package is used by another package in any underlay, then the overriding package in the overlay must be API and ABI compatible or undefined behavior at run time may occur.
If you understand the risks and want to override a package anyways, add the following to the command line:
--allow-overriding isaac_ros_common isaac_ros_launch_utils isaac_ros_test moveit_task_constructor_core moveit_task_constructor_msgs
This may be promoted to an error in a future release of colcon-override-check.
Starting >>> isaac_ros_common
Starting >>> moveit_task_constructor_msgs
Starting >>> rviz_marker_tools
Starting >>> robotiq_controllers
Starting >>> robotiq_description
Finished <<< robotiq_description [0.25s]
Finished <<< robotiq_controllers [0.58s]
--- stderr: isaac_ros_common
ERROR setuptools_scm._file_finders.git listing git files failed - pretending there aren't any
---
Finished <<< isaac_ros_common [4.58s]
Starting >>> nvblox_msgs
Starting >>> curobo_core
Starting >>> isaac_ros_cumotion_python_utils
Starting >>> isaac_ros_cumotion_interfaces
Starting >>> isaac_ros_cumotion_robot_description
Starting >>> isaac_ros_launch_utils
Starting >>> nvblox_ros_common
Starting >>> isaac_ros_test
Starting >>> nvblox_ros_python_utils
Starting >>> isaac_manipulator_ros_python_utils
--- stderr: rviz_marker_tools
rviz_marker_tools: You did not request a specific build type: Choosing 'Release' for maximum performance
---
Finished <<< rviz_marker_tools [10.2s]
Starting >>> isaac_ros_goal_setter_interfaces
--- stderr: isaac_ros_cumotion_robot_description
ERROR setuptools_scm._file_finders.git listing git files failed - pretending there aren't any
---
Finished <<< isaac_ros_cumotion_robot_description [8.76s]
Starting >>> isaac_manipulator_interfaces
--- stderr: isaac_ros_launch_utils
ERROR setuptools_scm._file_finders.git listing git files failed - pretending there aren't any
---
Finished <<< isaac_ros_launch_utils [8.87s]
Starting >>> isaac_ros_test_cmake
--- stderr: isaac_ros_cumotion_python_utils
ERROR setuptools_scm._file_finders.git listing git files failed - pretending there aren't any
---
Finished <<< isaac_ros_cumotion_python_utils [9.11s]
--- stderr: isaac_ros_test
ERROR setuptools_scm._file_finders.git listing git files failed - pretending there aren't any
---
Finished <<< isaac_ros_test [9.08s]
--- stderr: nvblox_ros_python_utils
ERROR setuptools_scm._file_finders.git listing git files failed - pretending there aren't any
---
Finished <<< nvblox_ros_python_utils [9.12s]
Finished <<< nvblox_ros_common [9.36s]
Starting >>> nvblox_image_padding
--- stderr: isaac_manipulator_ros_python_utils
ERROR setuptools_scm._file_finders.git listing git files failed - pretending there aren't any
---
Finished <<< isaac_manipulator_ros_python_utils [9.61s]
--- stderr: moveit_task_constructor_msgs
ERROR setuptools_scm._file_finders.git listing git files failed - pretending there aren't any
---
Finished <<< moveit_task_constructor_msgs [16.4s]
Starting >>> moveit_task_constructor_core
Finished <<< isaac_ros_test_cmake [5.16s]
--- stderr: isaac_ros_goal_setter_interfaces
ERROR setuptools_scm._file_finders.git listing git files failed - pretending there aren't any
---
Finished <<< isaac_ros_goal_setter_interfaces [11.4s]
Starting >>> isaac_ros_moveit_goal_setter
--- stderr: nvblox_msgs
ERROR setuptools_scm._file_finders.git listing git files failed - pretending there aren't any
---
Finished <<< nvblox_msgs [18.3s]
Starting >>> nvblox_rviz_plugin
Starting >>> semantic_label_conversion
--- stderr: moveit_task_constructor_core
moveit_task_constructor_core: You did not request a specific build type: Choosing 'Release' for maximum performance
CMake Warning at /opt/ros/humble/share/ament_cmake_gmock/cmake/ament_cmake_gmock-extras.cmake:110 (message):
'gmock' not found, C++ tests using 'Google Mock' can not be built. Please
install the 'Google Mock' headers globally in your system to enable these
tests (e.g. on Ubuntu/Debian install the package 'google-mock') or get the
ament package 'gmock_vendor'
Call Stack (most recent call first):
/opt/ros/humble/share/ament_cmake_gmock/cmake/ament_find_gmock.cmake:32 (_ament_cmake_gmock_find_gmock)
test/CMakeLists.txt:10 (ament_find_gmock)
CMake Error at test/CMakeLists.txt:36 (target_link_libraries):
Cannot specify link libraries for target
"moveit_task_constructor_core-test-mockups" which is not built by this
project.
Call Stack (most recent call first):
test/CMakeLists.txt:42 (mtc_add_test)
test/CMakeLists.txt:45 (mtc_add_gmock)
---
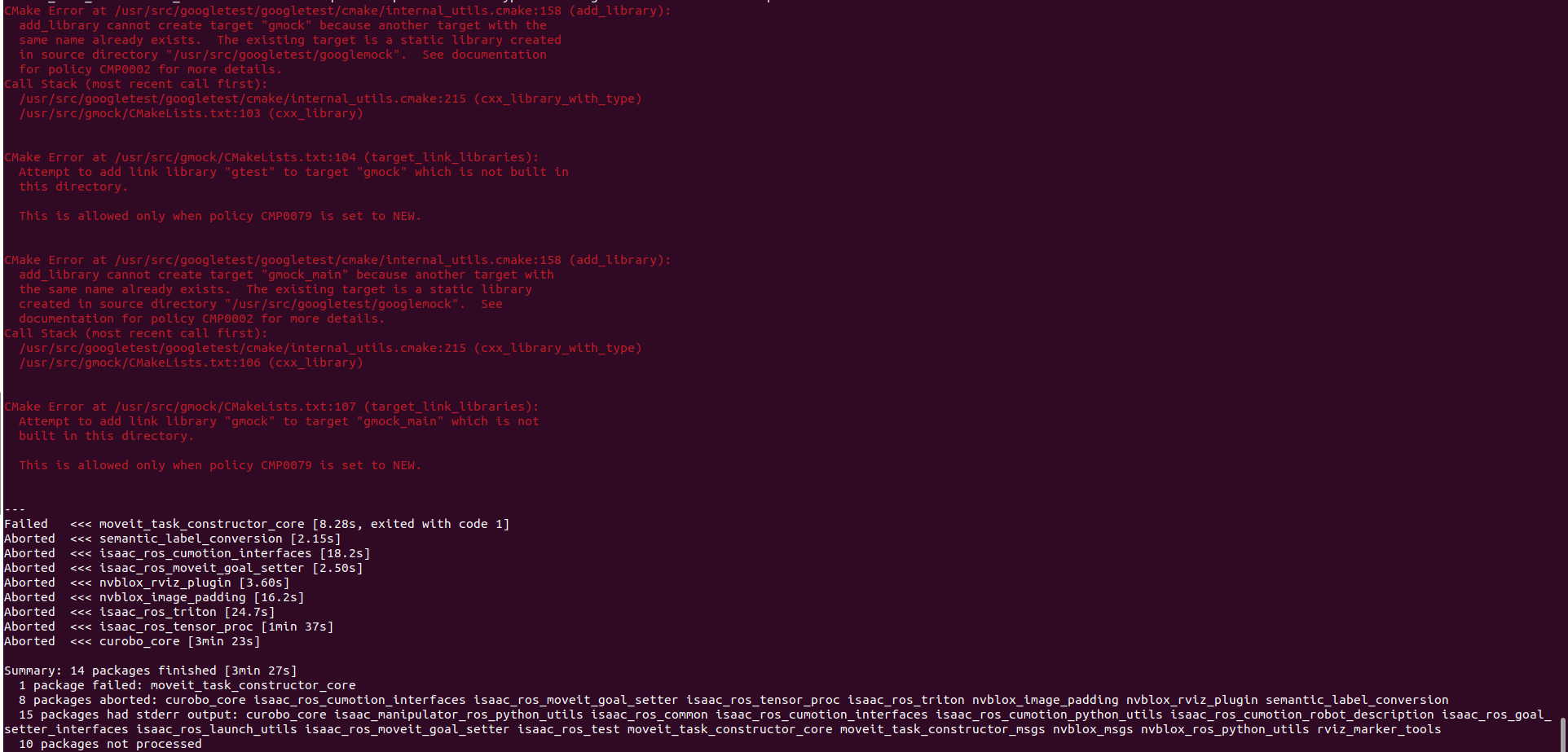
Failed <<< moveit_task_constructor_core [8.10s, exited with code 1]
Aborted <<< isaac_ros_moveit_goal_setter [3.17s]
Aborted <<< semantic_label_conversion [2.15s]
Aborted <<< isaac_ros_cumotion_interfaces [20.5s]
Aborted <<< nvblox_rviz_plugin [5.56s]
Aborted <<< isaac_manipulator_interfaces [19.3s]
Aborted <<< nvblox_image_padding [20.8s]
Aborted <<< curobo_core [3min 50s]
Summary: 15 packages finished [3min 55s]
1 package failed: moveit_task_constructor_core
7 packages aborted: curobo_core isaac_manipulator_interfaces isaac_ros_cumotion_interfaces isaac_ros_moveit_goal_setter nvblox_image_padding nvblox_rviz_plugin semantic_label_conversion
16 packages had stderr output: curobo_core isaac_manipulator_interfaces isaac_manipulator_ros_python_utils isaac_ros_common isaac_ros_cumotion_interfaces isaac_ros_cumotion_python_utils isaac_ros_cumotion_robot_description isaac_ros_goal_setter_interfaces isaac_ros_launch_utils isaac_ros_moveit_goal_setter isaac_ros_test moveit_task_constructor_core moveit_task_constructor_msgs nvblox_msgs nvblox_ros_python_utils rviz_marker_tools
11 packages not processed
admin@pu9730962:/workspaces/isaac_ros-dev$ colcon build --symlink-install --packages-up-to isaac_manipulator_bringup
[0.555s] WARNING:colcon.colcon_core.package_selection:Some selected packages are already built in one or more underlay workspaces:
'isaac_ros_common' is in: /workspaces/isaac_ros-dev/install/isaac_ros_common, /opt/ros/humble
'isaac_ros_launch_utils' is in: /workspaces/isaac_ros-dev/install/isaac_ros_launch_utils, /opt/ros/humble
'moveit_task_constructor_core' is in: /workspaces/isaac_ros-dev/install/moveit_task_constructor_core, /opt/ros/humble
'isaac_ros_test' is in: /workspaces/isaac_ros-dev/install/isaac_ros_test, /opt/ros/humble
'moveit_task_constructor_msgs' is in: /workspaces/isaac_ros-dev/install/moveit_task_constructor_msgs, /opt/ros/humble
If a package in a merged underlay workspace is overridden and it installs headers, then all packages in the overlay must sort their include directories by workspace order. Failure to do so may result in build failures or undefined behavior at run time.
If the overridden package is used by another package in any underlay, then the overriding package in the overlay must be API and ABI compatible or undefined behavior at run time may occur.
If you understand the risks and want to override a package anyways, add the following to the command line:
--allow-overriding isaac_ros_common isaac_ros_launch_utils isaac_ros_test moveit_task_constructor_core moveit_task_constructor_msgs
This may be promoted to an error in a future release of colcon-override-check.
Starting >>> isaac_ros_common
Starting >>> moveit_task_constructor_msgs
Starting >>> rviz_marker_tools
Finished <<< rviz_marker_tools [0.11s]
--- stderr: isaac_ros_common
ERROR setuptools_scm._file_finders.git listing git files failed - pretending there aren't any
---
Finished <<< isaac_ros_common [0.61s]
Starting >>> nvblox_msgs
Starting >>> curobo_core
Starting >>> isaac_ros_cumotion_python_utils
Starting >>> isaac_ros_cumotion_interfaces
Starting >>> isaac_ros_cumotion_robot_description
Starting >>> isaac_ros_launch_utils
Starting >>> nvblox_ros_common
Starting >>> isaac_ros_test
Starting >>> nvblox_ros_python_utils
Starting >>> isaac_manipulator_ros_python_utils
Starting >>> isaac_ros_goal_setter_interfaces
--- stderr: moveit_task_constructor_msgs
ERROR setuptools_scm._file_finders.git listing git files failed - pretending there aren't any
---
Finished <<< moveit_task_constructor_msgs [0.67s]
Starting >>> moveit_task_constructor_core
Finished <<< nvblox_ros_common [3.72s]
Starting >>> nvblox_image_padding
--- stderr: nvblox_msgs
ERROR setuptools_scm._file_finders.git listing git files failed - pretending there aren't any
---
Finished <<< nvblox_msgs [3.79s]
Starting >>> nvblox_rviz_plugin
Finished <<< nvblox_image_padding [0.57s]
Starting >>> semantic_label_conversion
Finished <<< semantic_label_conversion [0.42s]
--- stderr: isaac_ros_goal_setter_interfaces
ERROR setuptools_scm._file_finders.git listing git files failed - pretending there aren't any
---
Finished <<< isaac_ros_goal_setter_interfaces [4.72s]
Starting >>> isaac_ros_moveit_goal_setter
--- stderr: isaac_ros_cumotion_interfaces
ERROR setuptools_scm._file_finders.git listing git files failed - pretending there aren't any
---
Finished <<< isaac_ros_cumotion_interfaces [5.41s]
--- stderr: isaac_ros_launch_utils
ERROR setuptools_scm._file_finders.git listing git files failed - pretending there aren't any
---
Finished <<< isaac_ros_launch_utils [5.98s]
Starting >>> isaac_ros_test_cmake
--- stderr: isaac_ros_cumotion_robot_description
ERROR setuptools_scm._file_finders.git listing git files failed - pretending there aren't any
---
Finished <<< isaac_ros_cumotion_robot_description [6.07s]
--- stderr: isaac_ros_cumotion_python_utils
ERROR setuptools_scm._file_finders.git listing git files failed - pretending there aren't any
---
Finished <<< isaac_ros_cumotion_python_utils [6.09s]
Finished <<< isaac_ros_test_cmake [0.16s]
--- stderr: nvblox_ros_python_utils
ERROR setuptools_scm._file_finders.git listing git files failed - pretending there aren't any
---
Finished <<< nvblox_ros_python_utils [6.14s]
--- stderr: isaac_manipulator_ros_python_utils
ERROR setuptools_scm._file_finders.git listing git files failed - pretending there aren't any
---
Finished <<< isaac_manipulator_ros_python_utils [6.21s]
--- stderr: isaac_ros_test
ERROR setuptools_scm._file_finders.git listing git files failed - pretending there aren't any
---
Finished <<< isaac_ros_test [6.29s]
--- stderr: moveit_task_constructor_core
moveit_task_constructor_core: You did not request a specific build type: Choosing 'Release' for maximum performance
CMake Warning at /opt/ros/humble/share/ament_cmake_gmock/cmake/ament_cmake_gmock-extras.cmake:110 (message):
'gmock' not found, C++ tests using 'Google Mock' can not be built. Please
install the 'Google Mock' headers globally in your system to enable these
tests (e.g. on Ubuntu/Debian install the package 'google-mock') or get the
ament package 'gmock_vendor'
Call Stack (most recent call first):
/opt/ros/humble/share/ament_cmake_gmock/cmake/ament_find_gmock.cmake:32 (_ament_cmake_gmock_find_gmock)
test/CMakeLists.txt:10 (ament_find_gmock)
CMake Error at test/CMakeLists.txt:36 (target_link_libraries):
Cannot specify link libraries for target
"moveit_task_constructor_core-test-mockups" which is not built by this
project.
Call Stack (most recent call first):
test/CMakeLists.txt:42 (mtc_add_test)
test/CMakeLists.txt:45 (mtc_add_gmock)
---
Failed <<< moveit_task_constructor_core [6.72s, exited with code 1]
Aborted <<< curobo_core [6.82s]
Aborted <<< isaac_ros_moveit_goal_setter [2.58s]
Aborted <<< nvblox_rviz_plugin [16.1s]
Summary: 16 packages finished [20.9s]
1 package failed: moveit_task_constructor_core
3 packages aborted: curobo_core isaac_ros_moveit_goal_setter nvblox_rviz_plugin
13 packages had stderr output: isaac_manipulator_ros_python_utils isaac_ros_common isaac_ros_cumotion_interfaces isaac_ros_cumotion_python_utils isaac_ros_cumotion_robot_description isaac_ros_goal_setter_interfaces isaac_ros_launch_utils isaac_ros_moveit_goal_setter isaac_ros_test moveit_task_constructor_core moveit_task_constructor_msgs nvblox_msgs nvblox_ros_python_utils
9 packages not processed
Failed <<< moveit_task_constructor_core [6.72s, exited with code 1]
It looks that your build was failed with moveit_task_constructor_core
I followed the tutorial and the build can complete. However, my build log doesn’t show anything related to moveit_task_constructor_core. If this is in your source folder, please remove it and build again.