Hi, I am currently experimenting with the isaac ros nvblox Tutorial with an Intel Realsense D435. In the documentation it is described that vslam is used to determine the pose and this is used by Nvblox (see figure 1). However, the representation in rqt_graph shows no connection between vslam and nvblox (figure 2). Is vslam used at all? And how is the pose determined by vslam transmitted and used?
figure 1 (Doku Realsense Nvblox Tutorial):
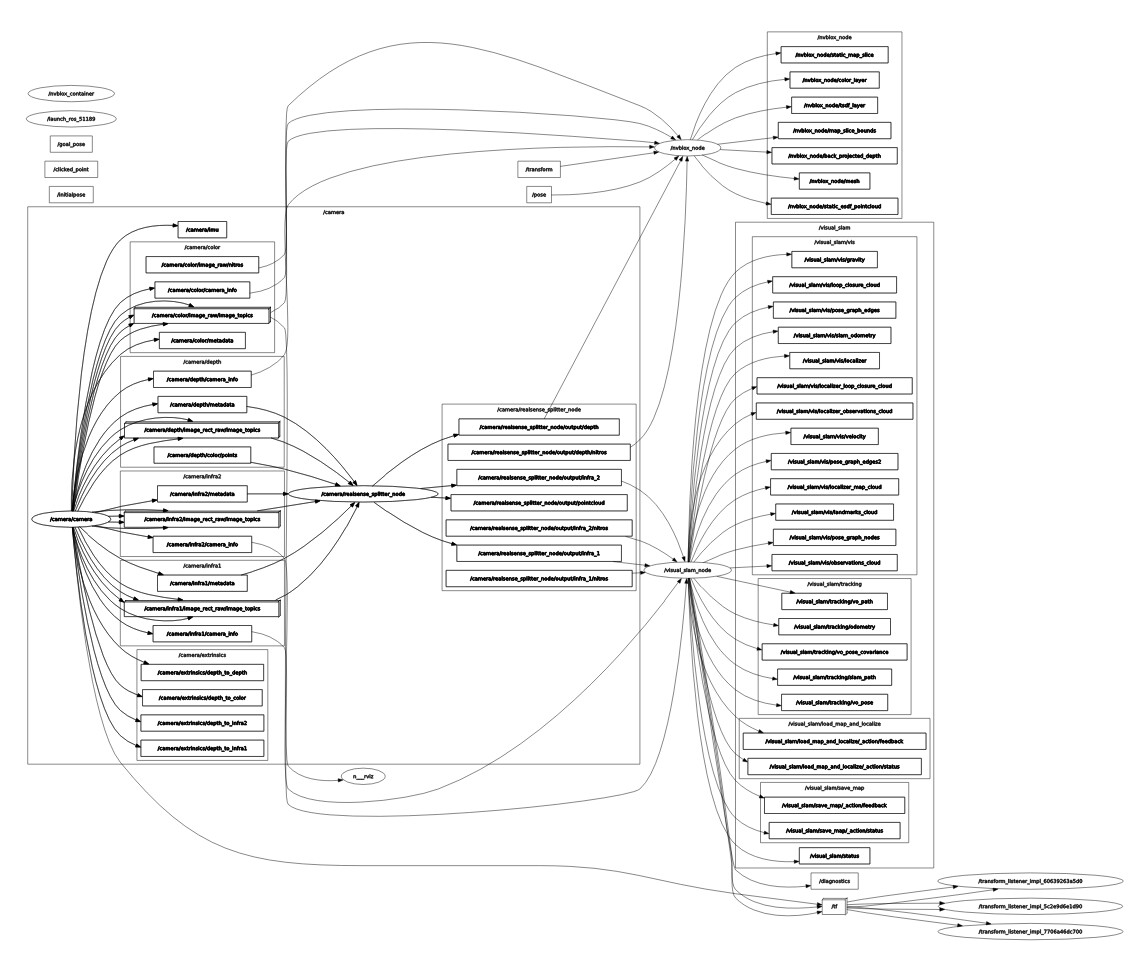
figure 2 (rqt_graph running Tutorial)
Thank you for your help.
Hi @miguel.siebenhaar
Isaac ROS nvblox, as you notice, reads the robot pose directly from the frame parameters and uses the Coordinate frames to detect the odometry position and expose a new map coordinate frame.
https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_visual_slam/isaac_ros_visual_slam/index.html#coordinate-frames
| ROS Parameter |
Type |
Default |
Description |
| *Frame Parameters |
|
|
|
map_frame |
std::string |
map |
The frame name associated with the map origin. |
odom_frame |
std::string |
odom |
The frame name associated with the odometry origin. |
base_frame |
std::string |
base_link |
The frame name associated with the base of the robot or camera rig. |
I hope my response clarifies your question. If not, please let me know.
Best,
Raffaello