我正在使用带有 jetpack 6.1 和 NVMe SSD 的 Jetson Orin Nano 8GB 开发者套件。我想将 ISAAC ROS 与 Intel Realsense D457 一起使用,但在按照此网站的说明进行传感器设置时遇到问题:
https://nvidia-isaac-ros.github.io/getting_started/hardware_setup/sensors/realsense_setup.html
在传感器设置之前,我已经从这两个网站完成了 Compute Setup 和 Developer Environment Setup:
https://nvidia-isaac-ros.github.io/getting_started/hardware_setup/compute/index.html
https://nvidia-isaac-ros.github.io/getting_started/dev_env_setup.html
在https://nvidia-isaac-ros.github.io/getting_started/hardware_setup/sensors/realsense_setup.html中完成了前三步
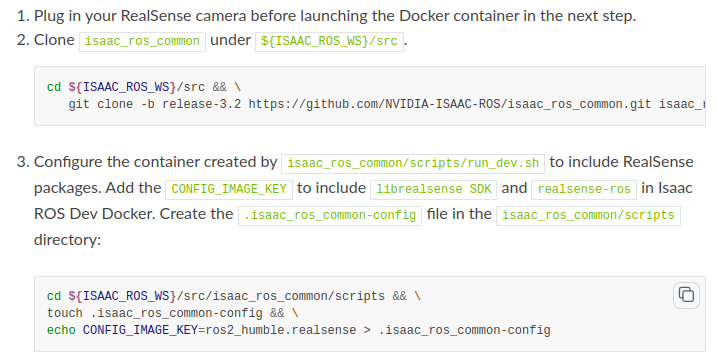
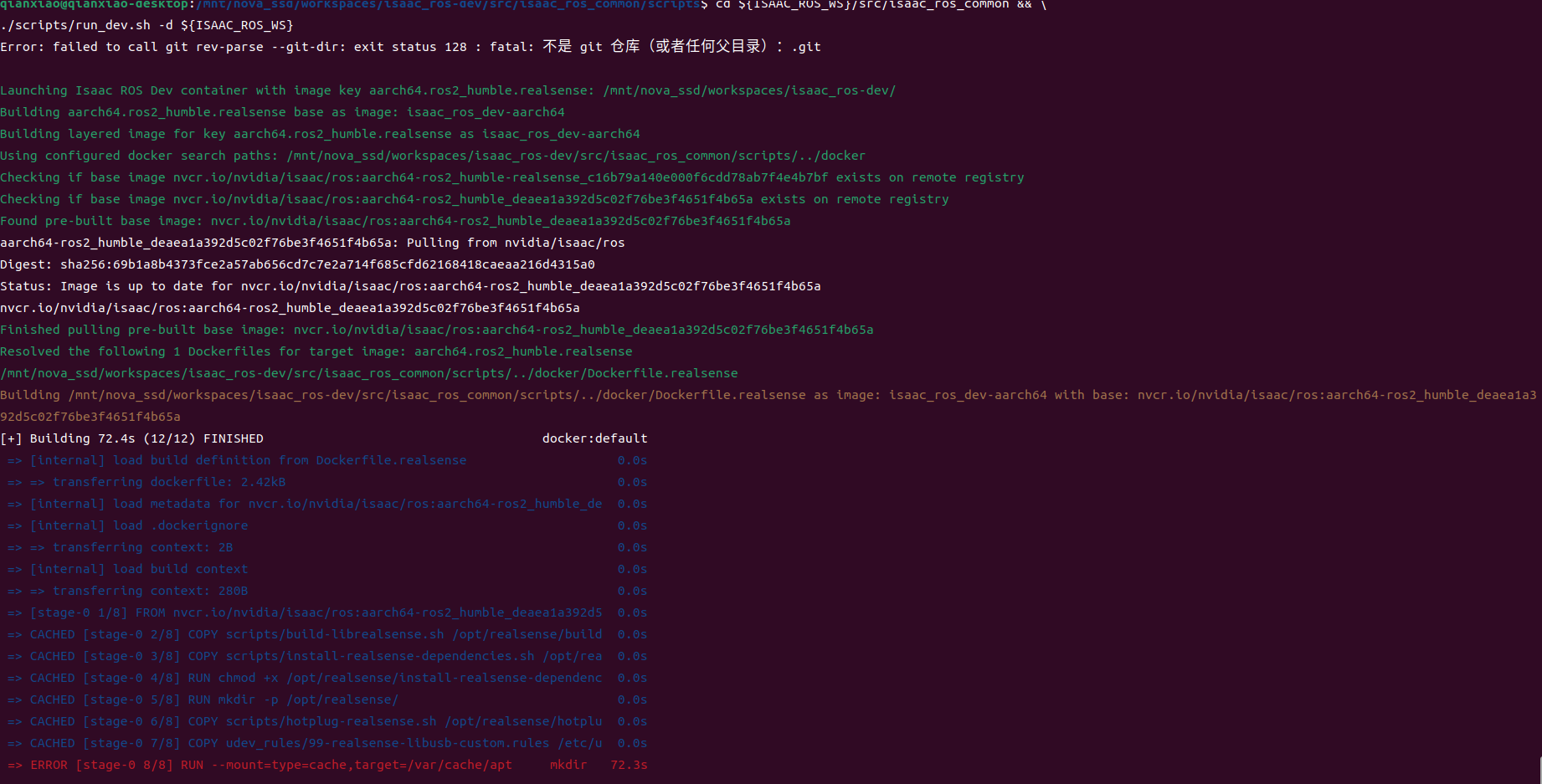
使用run_dev.sh创建容器出现错误
- List item
*qianxiao@qianxiao-desktop:/mnt/nova_ssd/workspaces/isaac_ros-dev/src/isaac_ros_common/scripts$ cd ${ISAAC_ROS_WS}/src/isaac_ros_common && \
./scripts/run_dev.sh -d ${ISAAC_ROS_WS}
Error: failed to call git rev-parse --git-dir: exit status 128 : fatal: 不是 git 仓库(或者任何父目录):.git
Launching Isaac ROS Dev container with image key aarch64.ros2_humble.realsense: /mnt/nova_ssd/workspaces/isaac_ros-dev/
Building aarch64.ros2_humble.realsense base as image: isaac_ros_dev-aarch64
Building layered image for key aarch64.ros2_humble.realsense as isaac_ros_dev-aarch64
Using configured docker search paths: /mnt/nova_ssd/workspaces/isaac_ros-dev/src/isaac_ros_common/scripts/../docker
Checking if base image nvcr.io/nvidia/isaac/ros:aarch64-ros2_humble-realsense_c16b79a140e000f6cdd78ab7f4e4b7bf exists on remote registry
Checking if base image nvcr.io/nvidia/isaac/ros:aarch64-ros2_humble_deaea1a392d5c02f76be3f4651f4b65a exists on remote registry
Found pre-built base image: nvcr.io/nvidia/isaac/ros:aarch64-ros2_humble_deaea1a392d5c02f76be3f4651f4b65a
aarch64-ros2_humble_deaea1a392d5c02f76be3f4651f4b65a: Pulling from nvidia/isaac/ros
Digest: sha256:69b1a8b4373fce2a57ab656cd7c7e2a714f685cfd62168418caeaa216d4315a0
Status: Image is up to date for nvcr.io/nvidia/isaac/ros:aarch64-ros2_humble_deaea1a392d5c02f76be3f4651f4b65a
nvcr.io/nvidia/isaac/ros:aarch64-ros2_humble_deaea1a392d5c02f76be3f4651f4b65a
Finished pulling pre-built base image: nvcr.io/nvidia/isaac/ros:aarch64-ros2_humble_deaea1a392d5c02f76be3f4651f4b65a
Resolved the following 1 Dockerfiles for target image: aarch64.ros2_humble.realsense
/mnt/nova_ssd/workspaces/isaac_ros-dev/src/isaac_ros_common/scripts/../docker/Dockerfile.realsense
Building /mnt/nova_ssd/workspaces/isaac_ros-dev/src/isaac_ros_common/scripts/../docker/Dockerfile.realsense as image: isaac_ros_dev-aarch64 with base: nvcr.io/nvidia/isaac/ros:aarch64-ros2_humble_deaea1a392d5c02f76be3f4651f4b65a
[+] Building 72.4s (12/12) FINISHED docker:default
=> [internal] load build definition from Dockerfile.realsense 0.0s
=> => transferring dockerfile: 2.42kB 0.0s
=> [internal] load metadata for nvcr.io/nvidia/isaac/ros:aarch64-ros2_humble_de 0.0s
=> [internal] load .dockerignore 0.0s
=> => transferring context: 2B 0.0s
=> [internal] load build context 0.0s
=> => transferring context: 280B 0.0s
=> [stage-0 1/8] FROM nvcr.io/nvidia/isaac/ros:aarch64-ros2_humble_deaea1a392d5 0.0s
=> CACHED [stage-0 2/8] COPY scripts/build-librealsense.sh /opt/realsense/build 0.0s
=> CACHED [stage-0 3/8] COPY scripts/install-realsense-dependencies.sh /opt/rea 0.0s
=> CACHED [stage-0 4/8] RUN chmod +x /opt/realsense/install-realsense-dependenc 0.0s
=> CACHED [stage-0 5/8] RUN mkdir -p /opt/realsense/ 0.0s
=> CACHED [stage-0 6/8] COPY scripts/hotplug-realsense.sh /opt/realsense/hotplu 0.0s
=> CACHED [stage-0 7/8] COPY udev_rules/99-realsense-libusb-custom.rules /etc/u 0.0s
=> ERROR [stage-0 8/8] RUN --mount=type=cache,target=/var/cache/apt mkdir 72.3s
------
> [stage-0 8/8] RUN --mount=type=cache,target=/var/cache/apt mkdir -p /opt/ros/humble/src && cd /opt/ros/humble/src && git clone https://github.com/NVIDIA-ISAAC-ROS/realsense-ros.git -b release/4.51.1-isaac && cd realsense-ros && source /opt/ros/humble/setup.bash && cd realsense2_camera_msgs && bloom-generate rosdebian && fakeroot debian/rules binary && cd ../ && apt-get install -y ./*.deb && rm ./*.deb && cd realsense2_description && bloom-generate rosdebian && fakeroot debian/rules binary && cd ../ && apt-get install -y ./*.deb && rm ./*.deb && cd realsense2_camera && bloom-generate rosdebian && sed -i 's/dh_shlibdeps -/dh_shlibdeps --dpkg-shlibdeps-params=--ignore-missing-info -/g' debian/rules && sed -i 's/ros-humble-librealsense2, //g' debian/control && fakeroot debian/rules binary && cd ../ && apt-get install -y ./*.deb && rm ./*.deb && cd ../ && rm -Rf realsense-ros:
0.098 Cloning into 'realsense-ros'...
72.23 error: RPC failed; curl 92 HTTP/2 stream 0 was not closed cleanly: CANCEL (err 8)
72.23 error: 5477 bytes of body are still expected
72.24 fetch-pack: unexpected disconnect while reading sideband packet
72.24 fatal: early EOF
72.24 fatal: fetch-pack: invalid index-pack output
------
Dockerfile.realsense:31
--------------------
30 | # Install realsense-ros ROS 2 package
31 | >>> RUN --mount=type=cache,target=/var/cache/apt \
32 | >>> mkdir -p ${ROS_ROOT}/src && cd ${ROS_ROOT}/src \
33 | >>> && git clone ${REALSENSE_ROS_GIT_URL} -b ${REALSENSE_ROS_VERSION} \
34 | >>> && cd realsense-ros && source ${ROS_ROOT}/setup.bash \
35 | >>> && cd realsense2_camera_msgs && bloom-generate rosdebian && fakeroot debian/rules binary \
36 | >>> && cd ../ && apt-get install -y ./*.deb && rm ./*.deb \
37 | >>> && cd realsense2_description && bloom-generate rosdebian && fakeroot debian/rules binary \
38 | >>> && cd ../ && apt-get install -y ./*.deb && rm ./*.deb \
39 | >>> && cd realsense2_camera && bloom-generate rosdebian \
40 | >>> && sed -i 's/dh_shlibdeps -/dh_shlibdeps --dpkg-shlibdeps-params=--ignore-missing-info -/g' debian/rules \
41 | >>> && sed -i 's/ros-humble-librealsense2, //g' debian/control \
42 | >>> && fakeroot debian/rules binary \
43 | >>> && cd ../ && apt-get install -y ./*.deb && rm ./*.deb \
44 | >>> && cd ../ && rm -Rf realsense-ros
45 |
--------------------
ERROR: failed to solve: process "/bin/bash -c mkdir -p ${ROS_ROOT}/src && cd ${ROS_ROOT}/src && git clone ${REALSENSE_ROS_GIT_URL} -b ${REALSENSE_ROS_VERSION} && cd realsense-ros && source ${ROS_ROOT}/setup.bash && cd realsense2_camera_msgs && bloom-generate rosdebian && fakeroot debian/rules binary && cd ../ && apt-get install -y ./*.deb && rm ./*.deb && cd realsense2_description && bloom-generate rosdebian && fakeroot debian/rules binary && cd ../ && apt-get install -y ./*.deb && rm ./*.deb && cd realsense2_camera && bloom-generate rosdebian && sed -i 's/dh_shlibdeps -/dh_shlibdeps --dpkg-shlibdeps-params=--ignore-missing-info -/g' debian/rules && sed -i 's/ros-humble-librealsense2, //g' debian/control && fakeroot debian/rules binary && cd ../ && apt-get install -y ./*.deb && rm ./*.deb && cd ../ && rm -Rf realsense-ros" did not complete successfully: exit code: 128
/mnt/nova_ssd/workspaces/isaac_ros-dev/src/isaac_ros_common
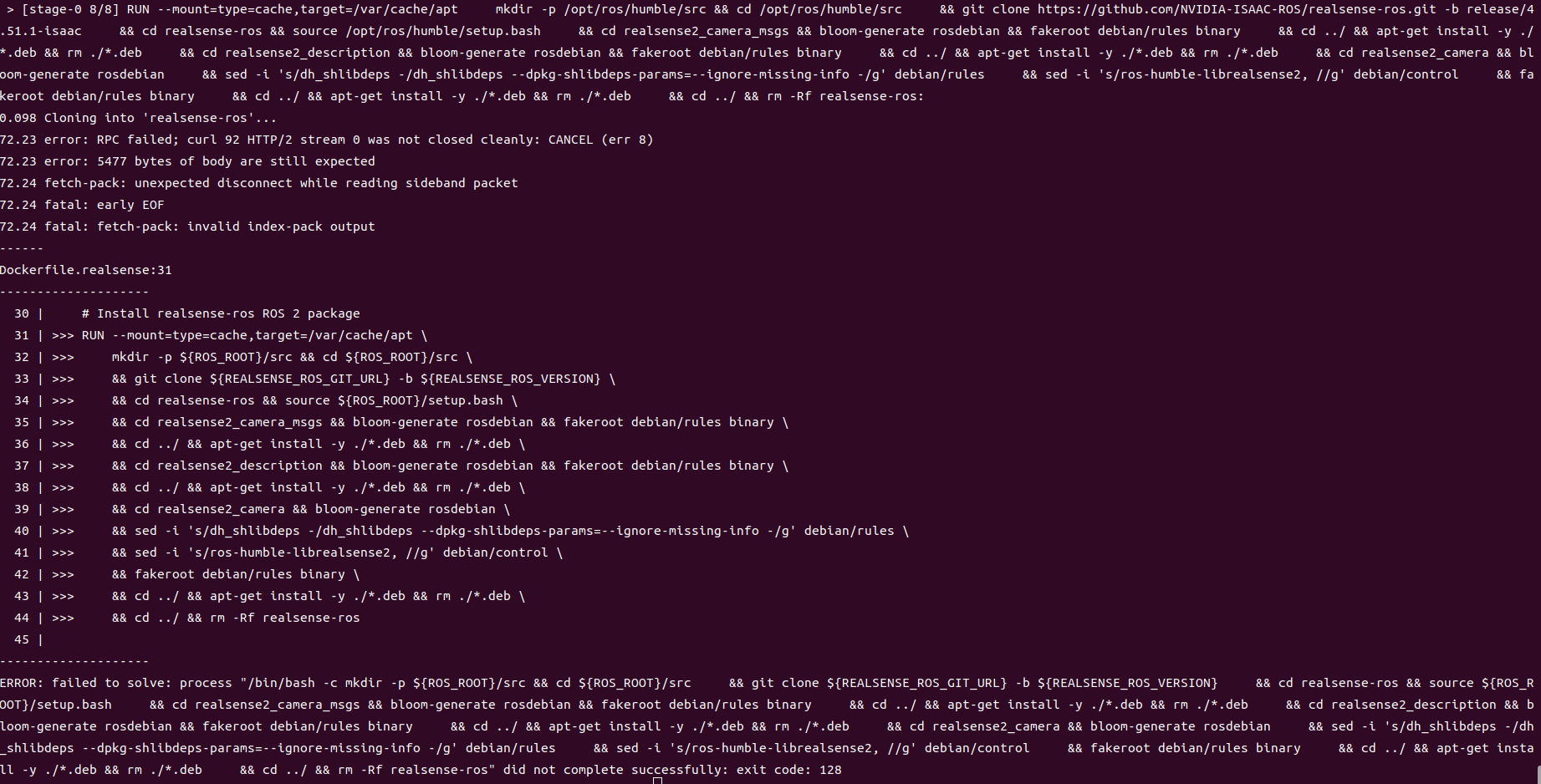
以上是输出信息,谁能帮我看看怎么解决