Hello, I am using a zed X mini and working in the isaac ros docker container and the problem is that the subscribers for the stereo camera aren’t being made when I launch the isaac ros vslam example for a zed camera. This is not allowing for the base link to be set which is affecting the fixed frame. When I do it though the zed_wrapper using terminal command:
ros2 launch zed_wrapper zed_camera.launch.py camera_model:=zedxm
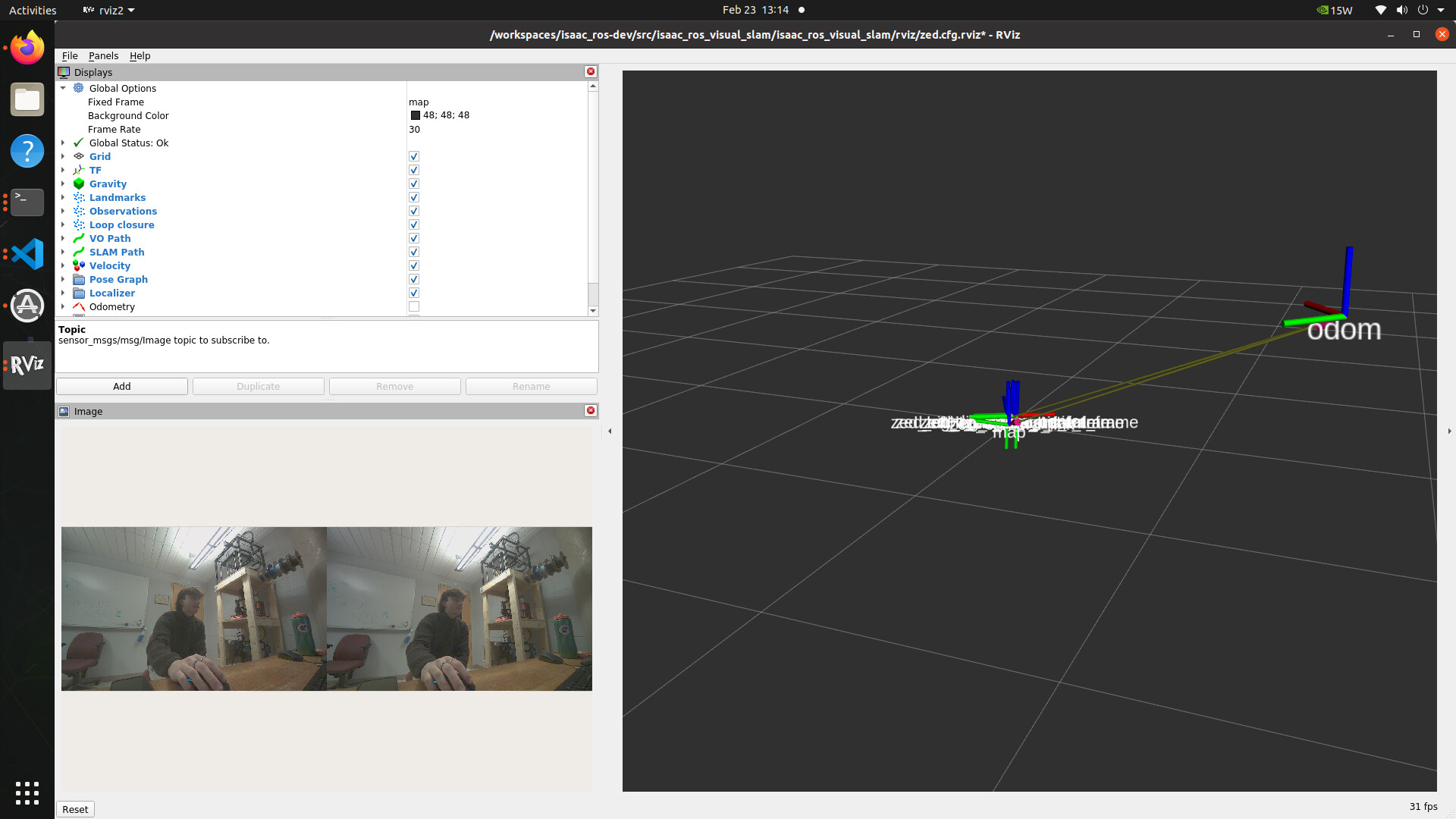
it works properly setting up the subscribers as seen in the photo below.

Giving me the rviz2 out of:
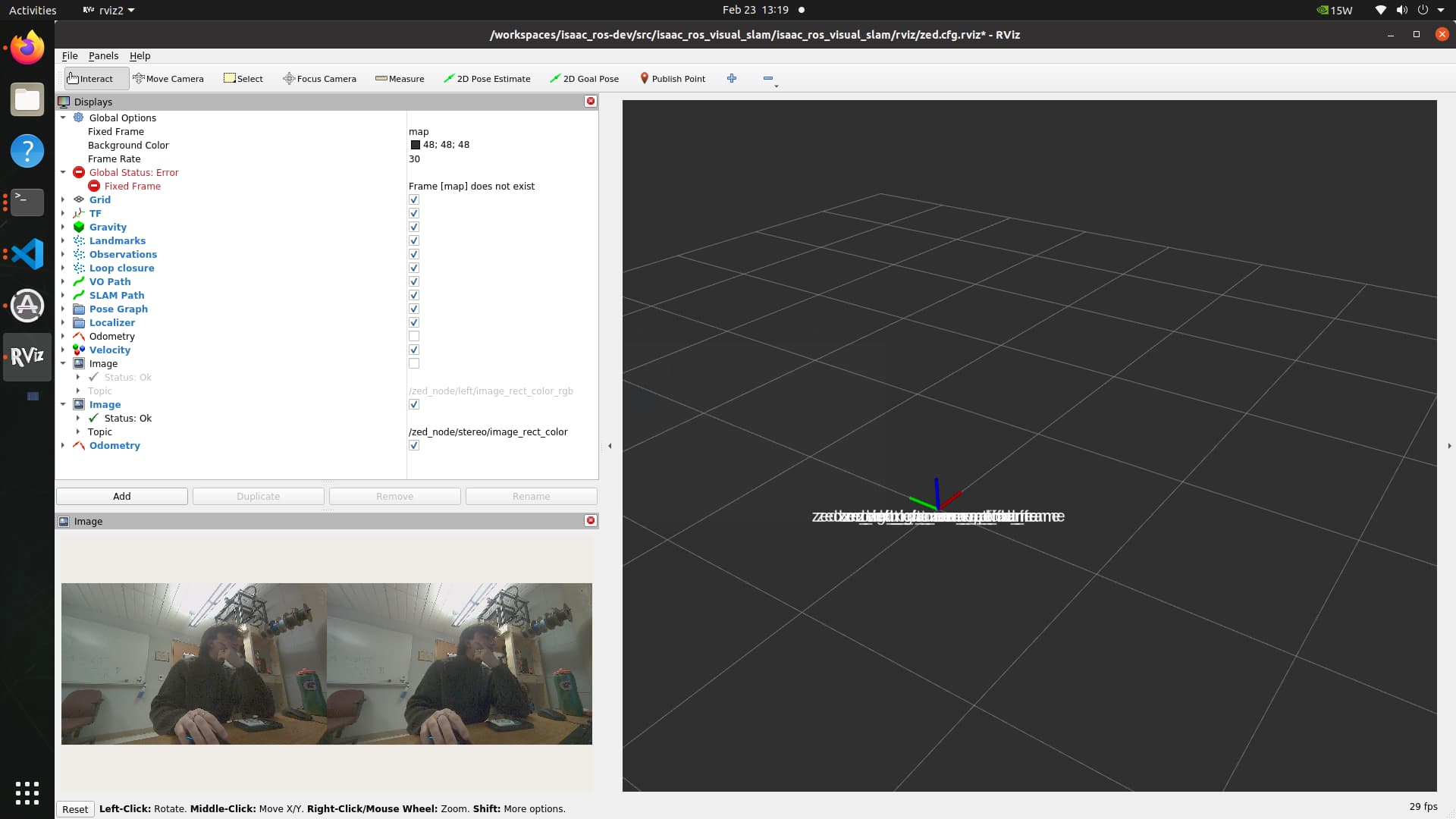
however when I do it with isaac ros vslam I get:
[zed_wrapper-2] [INFO] [1708712276.127245719] [zed_node]: *** Subscribers ***
[zed_wrapper-2] [WARN] [1708712276.164029097] [zed_node]: ! Failed to set thread params! - Policy not supported
[zed_wrapper-2] [WARN] [1708712276.179678822] [zed_node]: ! Failed to set thread params! - Policy not supported
[component_container-3] [INFO] [1708712298.098087952] [visual_slam_node]: Time taken by CUVSLAM_WarmUpGPU(): 23.549059
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node ‘/visual_slam_node’ in container ‘/visual_slam_launch_container’
giving me the rviz2 output (As you can see. I am getting camera output to the rviz):
Here is the full output for the isaac ros vslam:
admin@ubuntu:/workspaces/isaac_ros-dev$ ros2 launch isaac_ros_visual_slam isaac_ros_visual_slam_zed.launch.py
[INFO] [launch]: All log files can be found below /home/admin/.ros/log/2024-02-23-13-17-47-438813-ubuntu-20656
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [robot_state_publisher-1]: process started with pid [20674]
[INFO] [zed_wrapper-2]: process started with pid [20676]
[robot_state_publisher-1] [INFO] [1708712268.625886572] [zed_state_publisher]: got segment zedxm_camera_center
[robot_state_publisher-1] [INFO] [1708712268.626215153] [zed_state_publisher]: got segment zedxm_camera_link
[robot_state_publisher-1] [INFO] [1708712268.626244914] [zed_state_publisher]: got segment zedxm_left_camera_frame
[robot_state_publisher-1] [INFO] [1708712268.626258770] [zed_state_publisher]: got segment zedxm_left_camera_optical_frame
[robot_state_publisher-1] [INFO] [1708712268.626269554] [zed_state_publisher]: got segment zedxm_right_camera_frame
[robot_state_publisher-1] [INFO] [1708712268.626279026] [zed_state_publisher]: got segment zedxm_right_camera_optical_frame
[zed_wrapper-2] [INFO] [1708712268.741568119] [zed_node]: ********************************
[zed_wrapper-2] [INFO] [1708712268.741919517] [zed_node]: ZED Camera Component
[zed_wrapper-2] [INFO] [1708712268.741949182] [zed_node]: ********************************
[zed_wrapper-2] [INFO] [1708712268.741970590] [zed_node]: * namespace: /
[zed_wrapper-2] [INFO] [1708712268.741991614] [zed_node]: * node name: zed_node
[zed_wrapper-2] [INFO] [1708712268.742008638] [zed_node]: ********************************
[zed_wrapper-2] [INFO] [1708712268.742052511] [zed_node]: *** DEBUG parameters ***
[zed_wrapper-2] [INFO] [1708712268.742137025] [zed_node]: * SDK Verbose: 1
[zed_wrapper-2] [INFO] [1708712268.742189697] [zed_node]: * Debug Common: FALSE
[zed_wrapper-2] [INFO] [1708712268.742229602] [zed_node]: * Debug Simulation: FALSE
[zed_wrapper-2] [INFO] [1708712268.742264579] [zed_node]: * Debug Video/Depth: FALSE
[zed_wrapper-2] [INFO] [1708712268.742297155] [zed_node]: * Debug Control settings: FALSE
[zed_wrapper-2] [INFO] [1708712268.742328260] [zed_node]: * Debug Point Cloud: FALSE
[zed_wrapper-2] [INFO] [1708712268.742365988] [zed_node]: * Debug GNSS: FALSE
[zed_wrapper-2] [INFO] [1708712268.742399365] [zed_node]: * Debug Positional Tracking: FALSE
[zed_wrapper-2] [INFO] [1708712268.742432741] [zed_node]: * Debug sensors: FALSE
[zed_wrapper-2] [INFO] [1708712268.742472870] [zed_node]: * Debug Mapping: FALSE
[zed_wrapper-2] [INFO] [1708712268.742508359] [zed_node]: * Debug Object Detection: FALSE
[zed_wrapper-2] [INFO] [1708712268.742540359] [zed_node]: * Debug Body Tracking: FALSE
[zed_wrapper-2] [INFO] [1708712268.742577352] [zed_node]: * Debug Advanced: FALSE
[zed_wrapper-2] [INFO] [1708712268.742636841] [zed_node]: *** GENERAL parameters ***
[zed_wrapper-2] [INFO] [1708712268.742689065] [zed_node]: * SVO: ‘’
[zed_wrapper-2] [INFO] [1708712268.742750186] [zed_node]: * Camera model: zedxm - ZED X Mini
[zed_wrapper-2] [INFO] [1708712268.742800459] [zed_node]: * Camera name: zedxm
[zed_wrapper-2] [INFO] [1708712268.742839820] [zed_node]: * Camera SN: 0
[zed_wrapper-2] [INFO] [1708712268.742904205] [zed_node]: * Camera timeout [sec]: 5
[zed_wrapper-2] [INFO] [1708712268.742952142] [zed_node]: * Camera reconnection temptatives: 5
[zed_wrapper-2] [INFO] [1708712268.742994254] [zed_node]: * Camera framerate: 60
[zed_wrapper-2] [INFO] [1708712268.743032623] [zed_node]: * GPU ID: -1
[zed_wrapper-2] [WARN] [1708712268.743075088] [zed_node]: Not valid ‘general.grab_resolution’ value: ‘HD720’. Using ‘AUTO’ setting.
[zed_wrapper-2] [INFO] [1708712268.743116912] [zed_node]: * Camera resolution: AUTO
[zed_wrapper-2] [WARN] [1708712268.743158961] [zed_node]: Not valid ‘general.pub_resolution’ value: ‘MEDIUM’. Using default setting instead.
[zed_wrapper-2] [INFO] [1708712268.743188786] [zed_node]: * Publishing resolution: NATIVE
[zed_wrapper-2] [INFO] [1708712268.743229426] [zed_node]: * OpenCV custom calibration:
[zed_wrapper-2] [INFO] [1708712268.743301139] [zed_node]: * Region of interest:
[zed_wrapper-2] [INFO] [1708712268.743350196] [zed_node]: * Camera self calibration: TRUE
[zed_wrapper-2] [INFO] [1708712268.743392149] [zed_node]: * Camera flip: FALSE
[zed_wrapper-2] [INFO] [1708712268.743461814] [zed_node]: * [DYN] Publish framerate [Hz]: 60
[zed_wrapper-2] [INFO] [1708712268.743491190] [zed_node]: *** VIDEO parameters ***
[zed_wrapper-2] [INFO] [1708712268.743540279] [zed_node]: * [DYN] Saturation: 4
[zed_wrapper-2] [INFO] [1708712268.743583352] [zed_node]: * [DYN] Sharpness: 4
[zed_wrapper-2] [INFO] [1708712268.743622649] [zed_node]: * [DYN] Gamma: 8
[zed_wrapper-2] [INFO] [1708712268.743662233] [zed_node]: * [DYN] Auto Exposure/Gain: TRUE
[zed_wrapper-2] [INFO] [1708712268.743712698] [zed_node]: * [DYN] Exposure: 80
[zed_wrapper-2] [INFO] [1708712268.743751963] [zed_node]: * [DYN] Gain: 80
[zed_wrapper-2] [INFO] [1708712268.743788859] [zed_node]: * [DYN] Auto White Balance: TRUE
[zed_wrapper-2] [INFO] [1708712268.743827100] [zed_node]: * [DYN] White Balance Temperature: 42
[zed_wrapper-2] [INFO] [1708712268.743872637] [zed_node]: * [DYN] ZED X Exposure time: 16666
[zed_wrapper-2] [INFO] [1708712268.743914813] [zed_node]: * [DYN] ZED X Auto Exp. time range min: 28
[zed_wrapper-2] [INFO] [1708712268.743951614] [zed_node]: * [DYN] ZED X Auto Exp. time range max: 30000
[zed_wrapper-2] [INFO] [1708712268.743987550] [zed_node]: * [DYN] ZED X Exposure comp.: 50
[zed_wrapper-2] [INFO] [1708712268.744027775] [zed_node]: * [DYN] ZED X Analog Gain: 8000
[zed_wrapper-2] [INFO] [1708712268.744068512] [zed_node]: * [DYN] ZED X Auto Analog Gain range min: 1000
[zed_wrapper-2] [INFO] [1708712268.744103296] [zed_node]: * [DYN] ZED X Auto Analog Gain range max: 16000
[zed_wrapper-2] [INFO] [1708712268.744139585] [zed_node]: * [DYN] ZED X Digital Gain: 128
[zed_wrapper-2] [INFO] [1708712268.744179394] [zed_node]: * [DYN] ZED X Auto Digital Gain range min: 1
[zed_wrapper-2] [INFO] [1708712268.744215458] [zed_node]: * [DYN] ZED X Auto Digital Gain range max: 256
[zed_wrapper-2] [INFO] [1708712268.744337028] [zed_node]: * [DYN] ZED X Auto Digital Gain range max: 50
[zed_wrapper-2] [INFO] [1708712268.744389637] [zed_node]: * Video QoS History: KEEP_LAST
[zed_wrapper-2] [INFO] [1708712268.744428742] [zed_node]: * Video QoS History depth: 1
[zed_wrapper-2] [INFO] [1708712268.744466214] [zed_node]: * Video QoS Reliability: RELIABLE
[zed_wrapper-2] [INFO] [1708712268.744502247] [zed_node]: * Video QoS Durability: VOLATILE
[zed_wrapper-2] [INFO] [1708712268.744534695] [zed_node]: *** DEPTH parameters ***
[zed_wrapper-2] [INFO] [1708712268.744585192] [zed_node]: * Depth mode: NONE - DEPTH DISABLED
[zed_wrapper-2] [INFO] [1708712268.744613577] [zed_node]: *** SENSORS STACK parameters ***
[zed_wrapper-2] [INFO] [1708712268.744650633] [zed_node]: * Broadcast IMU TF [not for ZED]: FALSE
[zed_wrapper-2] [INFO] [1708712268.744685802] [zed_node]: * Sensors Camera Sync: FALSE
[zed_wrapper-2] [INFO] [1708712268.744740331] [zed_node]: * Sensors publishing rate: 200 Hz
[zed_wrapper-2] [INFO] [1708712268.744778059] [zed_node]: * Sensors QoS History: KEEP_LAST
[zed_wrapper-2] [INFO] [1708712268.744816236] [zed_node]: * Sensors QoS History depth: 1
[zed_wrapper-2] [INFO] [1708712268.744857388] [zed_node]: * Sensors QoS Reliability: RELIABLE
[zed_wrapper-2] [INFO] [1708712268.744893645] [zed_node]: * Sensors QoS Durability: VOLATILE
[zed_wrapper-2] [INFO] [1708712268.744917901] [zed_node]: *** Advanced parameters ***
[zed_wrapper-2] [INFO] [1708712268.744955662] [zed_node]: * Thread sched. policy:
[zed_wrapper-2] [INFO] [1708712268.745063504] [zed_node]: *** SERVICES ***
[zed_wrapper-2] [INFO] [1708712268.747354805] [zed_node]: * ‘/zed_node/start_svo_rec’
[zed_wrapper-2] [INFO] [1708712268.749145842] [zed_node]: * ‘/zed_node/stop_svo_rec’
[zed_wrapper-2] [INFO] [1708712268.749848477] [zed_node]: * ‘/zed_node/set_roi’
[zed_wrapper-2] [INFO] [1708712268.750426022] [zed_node]: * ‘/zed_node/reset_roi’
[zed_wrapper-2] [INFO] [1708712268.750492679] [zed_node]: ***** STARTING CAMERA *****
[zed_wrapper-2] [INFO] [1708712268.750520840] [zed_node]: ZED SDK Version: 4.0.8 - Build 80393_b12da209
[zed_wrapper-2] [INFO] [1708712268.757649595] [zed_node]: *** CAMERA OPENING ***
[zed_wrapper-2] [2024-02-23 18:17:49 UTC][ZED][INFO] Logging level INFO
[zed_wrapper-2] [ZED][INFO] Using GMSL input… Switched to default resolution HD1200
[zed_wrapper-2] [2024-02-23 18:17:49 UTC][ZED][INFO] [Init] Depth mode: NONE
[zed_wrapper-2] [ZED-X][Warning] Failed to connect to zed_x_daemon.
[zed_wrapper-2] [ZED-X][Warning] Failed to verify the match between the L4T version of the host and the container. If you are indeed in a container, be sure to run the same L4T version on both.
[zed_wrapper-2] [2024-02-23 18:17:53 UTC][ZED][INFO] [Init] Camera FW version: 2001
[zed_wrapper-2] [2024-02-23 18:17:53 UTC][ZED][INFO] [Init] Video mode: HD1200@60
[zed_wrapper-2] [2024-02-23 18:17:53 UTC][ZED][INFO] [Init] Serial Number: S/N 53432554
[INFO] [component_container-3]: process started with pid [20819]
[component_container-3] [ERROR] [1708712273.955875929] [visual_slam_launch_container]: Could not find requested resource in ament index
[ERROR] [launch_ros.actions.load_composable_nodes]: Failed to load node ‘image_format_node_left’ of type ‘nvidia::isaac_ros::image_proc::ImageFormatConverterNode’ in container ‘/visual_slam_launch_container’: Could not find requested resource in ament index
[component_container-3] [ERROR] [1708712273.963006380] [visual_slam_launch_container]: Could not find requested resource in ament index
[ERROR] [launch_ros.actions.load_composable_nodes]: Failed to load node ‘image_format_node_right’ of type ‘nvidia::isaac_ros::image_proc::ImageFormatConverterNode’ in container ‘/visual_slam_launch_container’: Could not find requested resource in ament index
[component_container-3] [INFO] [1708712273.977989854] [visual_slam_launch_container]: Load Library: /workspaces/isaac_ros-dev/install/isaac_ros_visual_slam/lib/libvisual_slam_node.so
[component_container-3] [INFO] [1708712274.231910599] [visual_slam_launch_container]: Found class: rclcpp_components::NodeFactoryTemplatenvidia::isaac_ros::visual_slam::VisualSlamNode
[component_container-3] [INFO] [1708712274.235107994] [visual_slam_launch_container]: Instantiate class: rclcpp_components::NodeFactoryTemplatenvidia::isaac_ros::visual_slam::VisualSlamNode
[component_container-3] [INFO] [1708712274.547750200] [visual_slam_node]: cuVSLAM version: 11.4
[zed_wrapper-2] [INFO] [1708712275.049725578] [zed_node]: ZED SDK running on GPU #0
[zed_wrapper-2] [INFO] [1708712275.049901581] [zed_node]: * Camera Model → ZED X Mini
[zed_wrapper-2] [INFO] [1708712275.049931341] [zed_node]: * Serial Number → 53432554
[zed_wrapper-2] [INFO] [1708712275.049965646] [zed_node]: * Focal Lenght → 2.20579 mm
[zed_wrapper-2] [INFO] [1708712275.050006158] [zed_node]: * Input → GMSL input type
[zed_wrapper-2] [INFO] [1708712275.050037711] [zed_node]: * Camera FW Version → 2001
[zed_wrapper-2] [INFO] [1708712275.050061583] [zed_node]: * Sensors FW Version → 1000
[zed_wrapper-2] [INFO] [1708712275.050086992] [zed_node]: * Camera grab frame size → 1920x1200
[zed_wrapper-2] [INFO] [1708712275.050108208] [zed_node]: * Publishing frame size → 1920x1200
[zed_wrapper-2] [INFO] [1708712275.050158225] [zed_node]: *** TF FRAMES ***
[zed_wrapper-2] [INFO] [1708712275.050183953] [zed_node]: * Map → map
[zed_wrapper-2] [INFO] [1708712275.050203025] [zed_node]: * Odometry → odom
[zed_wrapper-2] [INFO] [1708712275.050221266] [zed_node]: * Base →
[zed_wrapper-2] [INFO] [1708712275.050240754] [zed_node]: * Camera → zedxm_camera_center
[zed_wrapper-2] [INFO] [1708712275.050259442] [zed_node]: * Left → zedxm_left_camera_frame
[zed_wrapper-2] [INFO] [1708712275.050278291] [zed_node]: * Left Optical → zedxm_left_camera_optical_frame
[zed_wrapper-2] [INFO] [1708712275.050297395] [zed_node]: * RGB → zedxm_left_camera_frame
[zed_wrapper-2] [INFO] [1708712275.050316403] [zed_node]: * RGB Optical → zedxm_left_camera_frame
[zed_wrapper-2] [INFO] [1708712275.050335732] [zed_node]: * Right → zedxm_right_camera_frame
[zed_wrapper-2] [INFO] [1708712275.050397141] [zed_node]: * Right Optical → zedxm_right_camera_optical_frame
[zed_wrapper-2] [INFO] [1708712275.050435157] [zed_node]: * IMU → zedxm_imu_link
[zed_wrapper-2] [INFO] [1708712275.050518486] [zed_node]: *** PUBLISHED TOPICS ***
[zed_wrapper-2] [INFO] [1708712275.646755710] [zed_node]: Advertised on topic: /zed_node/rgb/image_rect_color
[zed_wrapper-2] [INFO] [1708712275.650723070] [zed_node]: Advertised on topic: /zed_node/rgb/camera_info
[zed_wrapper-2] [INFO] [1708712275.685884727] [zed_node]: Advertised on topic: /zed_node/rgb_gray/image_rect_gray
[zed_wrapper-2] [INFO] [1708712275.689967449] [zed_node]: Advertised on topic: /zed_node/rgb_gray/camera_info
[zed_wrapper-2] [INFO] [1708712275.752856273] [zed_node]: Advertised on topic: /zed_node/rgb_raw/image_raw_color
[zed_wrapper-2] [INFO] [1708712275.754661199] [zed_node]: Advertised on topic: /zed_node/rgb_raw/camera_info
[zed_wrapper-2] [INFO] [1708712275.784075274] [zed_node]: Advertised on topic: /zed_node/rgb_raw_gray/image_raw_gray
[zed_wrapper-2] [INFO] [1708712275.786470513] [zed_node]: Advertised on topic: /zed_node/rgb_raw_gray/camera_info
[zed_wrapper-2] [INFO] [1708712275.804586550] [zed_node]: Advertised on topic: /zed_node/left/image_rect_color
[zed_wrapper-2] [INFO] [1708712275.807100670] [zed_node]: Advertised on topic: /zed_node/left/camera_info
[zed_wrapper-2] [INFO] [1708712275.833165636] [zed_node]: Advertised on topic: /zed_node/left_gray/image_rect_gray
[zed_wrapper-2] [INFO] [1708712275.839458473] [zed_node]: Advertised on topic: /zed_node/left_gray/camera_info
[zed_wrapper-2] [INFO] [1708712275.866544351] [zed_node]: Advertised on topic: /zed_node/left_raw/image_raw_color
[zed_wrapper-2] [INFO] [1708712275.870148538] [zed_node]: Advertised on topic: /zed_node/left_raw/camera_info
[zed_wrapper-2] [INFO] [1708712275.903030861] [zed_node]: Advertised on topic: /zed_node/left_raw_gray/image_raw_gray
[zed_wrapper-2] [INFO] [1708712275.905976541] [zed_node]: Advertised on topic: /zed_node/left_raw_gray/camera_info
[zed_wrapper-2] [INFO] [1708712275.934260934] [zed_node]: Advertised on topic: /zed_node/right/image_rect_color
[zed_wrapper-2] [INFO] [1708712275.940931474] [zed_node]: Advertised on topic: /zed_node/right/camera_info
[zed_wrapper-2] [INFO] [1708712275.968128650] [zed_node]: Advertised on topic: /zed_node/right_gray/image_rect_gray
[zed_wrapper-2] [INFO] [1708712275.975951144] [zed_node]: Advertised on topic: /zed_node/right_gray/camera_info
[zed_wrapper-2] [INFO] [1708712276.008063823] [zed_node]: Advertised on topic: /zed_node/right_raw/image_raw_color
[zed_wrapper-2] [INFO] [1708712276.011173634] [zed_node]: Advertised on topic: /zed_node/right_raw/camera_info
[zed_wrapper-2] [INFO] [1708712276.040585085] [zed_node]: Advertised on topic: /zed_node/right_raw_gray/image_raw_gray
[zed_wrapper-2] [INFO] [1708712276.043745488] [zed_node]: Advertised on topic: /zed_node/right_raw_gray/camera_info
[zed_wrapper-2] [INFO] [1708712276.067021673] [zed_node]: Advertised on topic: /zed_node/stereo/image_rect_color
[zed_wrapper-2] [INFO] [1708712276.095838171] [zed_node]: Advertised on topic: /zed_node/stereo_raw/image_raw_color
[zed_wrapper-2] [INFO] [1708712276.107293844] [zed_node]: Advertised on topic: /zed_node/imu/data
[zed_wrapper-2] [INFO] [1708712276.113168787] [zed_node]: Advertised on topic: /zed_node/imu/data_raw
[zed_wrapper-2] [INFO] [1708712276.121620412] [zed_node]: Advertised on topic: /zed_node/temperature/imu
[zed_wrapper-2] [INFO] [1708712276.126971218] [zed_node]: Advertised on topic: /zed_node/left_cam_imu_transform
[zed_wrapper-2] [INFO] [1708712276.127117045] [zed_node]: Camera-IMU Translation:
[zed_wrapper-2] 0 -0.034502 -0.004356
[zed_wrapper-2] [INFO] [1708712276.127207766] [zed_node]: Camera-IMU Rotation:
[zed_wrapper-2] FFFFC65265E0
[zed_wrapper-2] 0.999986 -0.005202 0.000491
[zed_wrapper-2] 0.005202 0.999986 -0.001091
[zed_wrapper-2] -0.000485 0.001093 0.999999
[zed_wrapper-2]
[zed_wrapper-2] [INFO] [1708712276.127245719] [zed_node]: *** Subscribers ***
[zed_wrapper-2] [WARN] [1708712276.164029097] [zed_node]: ! Failed to set thread params! - Policy not supported
[zed_wrapper-2] [WARN] [1708712276.179678822] [zed_node]: ! Failed to set thread params! - Policy not supported
[component_container-3] [INFO] [1708712298.098087952] [visual_slam_node]: Time taken by CUVSLAM_WarmUpGPU(): 23.549059
[INFO] [launch_ros.actions.load_composable_nodes]: Loaded node ‘/visual_slam_node’ in container ‘/visual_slam_launch_container’