Hi NVIDIA Developers, we are glad to share our latest project, JetHexa, here!
Overview
JetHexa is an open-source hexapod robot powered by Jetson Nano B01. Jetson Nano is a compact AI computer with ultra-high performance and power consumption. It can run modern AI workload, run multiple neural networks in parallel, and process data from multiple high-resolution sensors at the same time. Supported by the powerful computing power, JetHexa can achieve advanced features using various high-performance components, such as Lidar, depth camera and serial bus servos. In addition, adopting novel inverse kinematics algorithm, JetHexa can move more stably and flexibly.
Robot Applications & Coding
1. Mapping Navigation:
JetHexa incorporates the Simultaneous Localization and Mapping (SLAM) algorithm, allowing it to construct or update maps of unknown environments while accurately tracking its position within them. Once the map is built, JetHexa can autonomously navigate in real-time using various sensors such as 3D depth cameras and Lidar.
<arg name="slam_methods" default="cartographer" doc="slam type [gmapping,karto,hector,cartographer]"/>
<group ns="$(arg robot_name)">
<!-- Start the selected SLAM algorithm -->
<include file="$(find jethexa_slam)/launch/jethexa_$(arg slam_methods).launch">
<arg name="robot_name" value="$(arg robot_name)"/>
<arg name="tf_prefix" value="$(arg tf_prefix)"/>
<arg name="scan_topic" value="$(arg scan_topic)" />
<arg name="odom_topic" value="$(arg odom_topic)" />
</include>
</group>
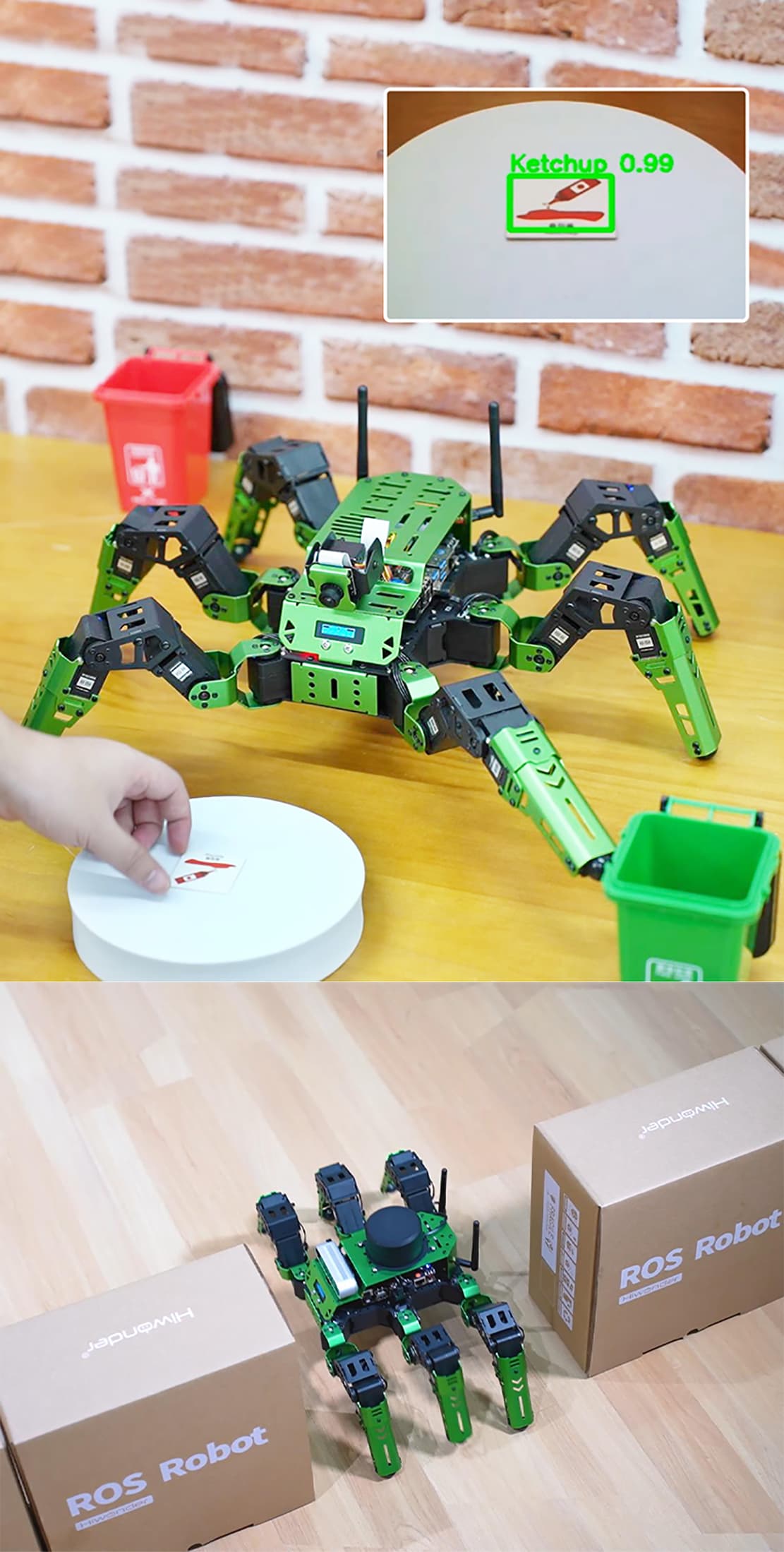
2. Deep Learning, Model Training and MediaPipe Development
JetHexa leverages powerful neural networks like GoogLeNet, Yolo, mtcnn, and more for deep learning and model training. By loading various models, it can swiftly recognize targets and execute complex AI projects like waste sorting, mask identification, emotion recognition, and more. Additionally, we have developed JetHexa on the MediaPipe framework, enabling capabilities such as human body tracking, hand detection, posture detection, overall detection, face detection, 3D detection, and more.
3. Based on Robot Operating System (ROS) and Gazebo Simulation
JetHexa is built on the Robot Operating System (ROS), which provides a comprehensive collection of software libraries, communication protocols, and tools. This integration greatly simplifies the user’s secondary development process. Additionally, we have created a realistic 3D model in Gazebo, allowing users to thoroughly test and evaluate robotic systems and algorithms before deploying them on physical hardware.
About Us
Established in 2015, Hiwonder is a leading brand in educational robotics. Driven by our vision to popularize artificial intelligence robots, we have dedicated years of effort to harnessing the power of AI. Our mission is to provide makers with amazing robots and solutions globally, while offering users an enhanced learning experience to bring their ideas to life.
Hiwonder Team