Hi jmeef0802,
Can you tell me after system reboot, what are the steps you followed?
Did you load all required CAN modules?
There is no need to change pinmux in Tx2.
what are the can-utils command you used and tell me your connections also.
Hi,
Can you try loopback test and see if data goes? For loopback, you have to short Tx and Rx pin of can0. #modprobe can #modprobe can_raw #modprobe mttcan
#ip link set can0 type can bitrate 500000 dbitrate 2000000 berr-reporting on fd on loopback on
Hi, thank you to reply.
All command seems to work well…
Is it J26 pin problem??
Then how to wake this pin in Jetson TX2?
or how do i check that pins are registered well ??
Hi,
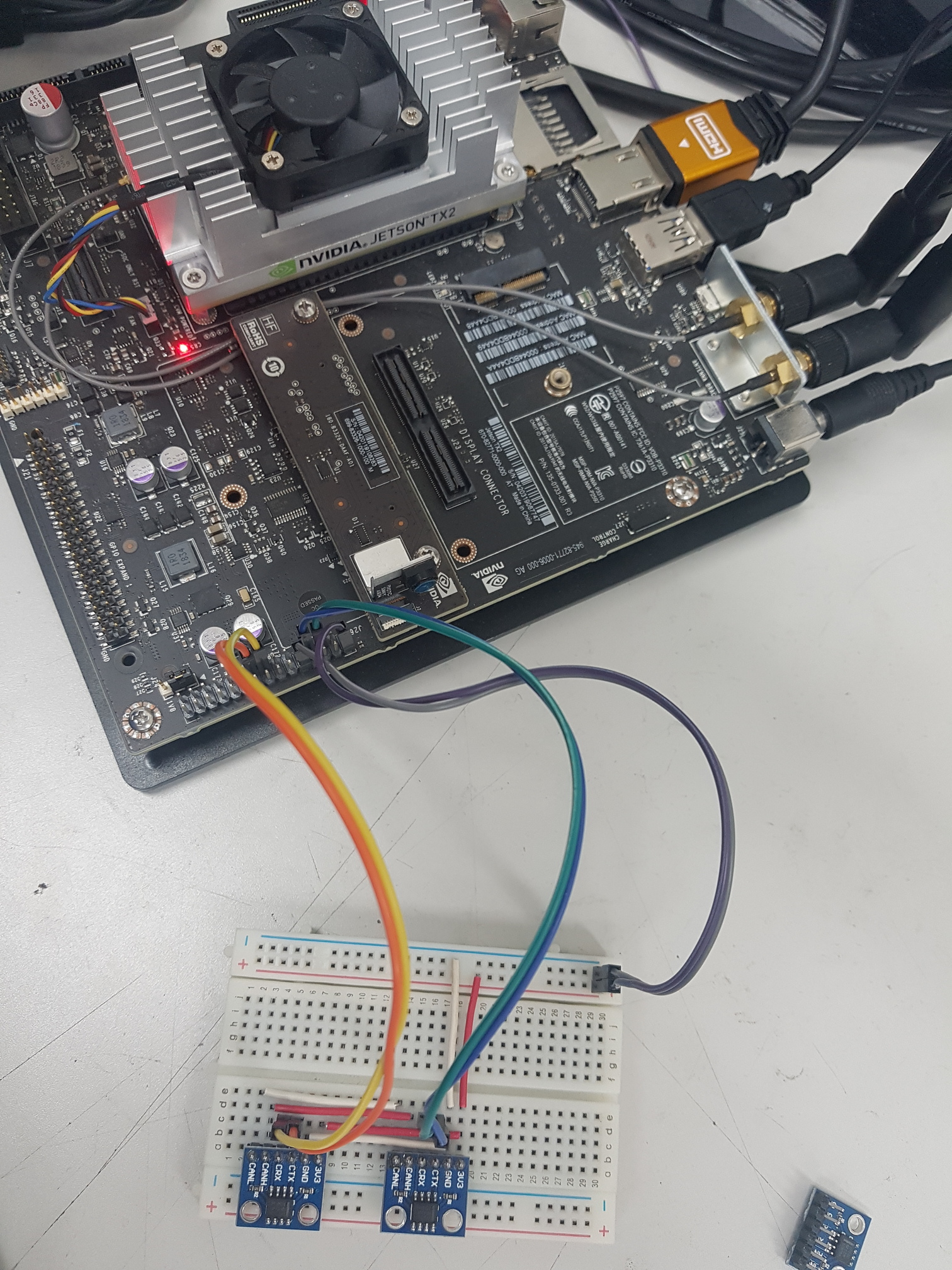
Connections look fine.
First run dump in background then keep sending, also bring can down once then up again.
ip link set can0 down
ip link set can1 down
ip link set can0 up
ip link set can1 up
candump can1 &
cansend can0 123#abcdabcd
Register data is also fine.
Is your device up before sending msgs? Can you measure voltage at din, dout pins?
It is not the driver issue. Driver works fine on all Jetson boards.
If issue still exists, can you reboot the device and run all steps again once?