jetson xavier nx running jetpack 5.1.2,
realsense D435i, firmware is updated
usb cable is 3.2
installed Issac ROS v2.1 and the respective 2.1v release files onto the Xavier, initially we faced a issues with the container failing to build due to lib real sense mismatch , which i put as a separate post here Cant build isaac ros image to use vslam
after trying to get it work, it started working when i ignored this step on the real sense setup
after successfully launching the container, we again faced problems building the VSLAM packages with colcon build, we even reflashed the xavier and still there were problems
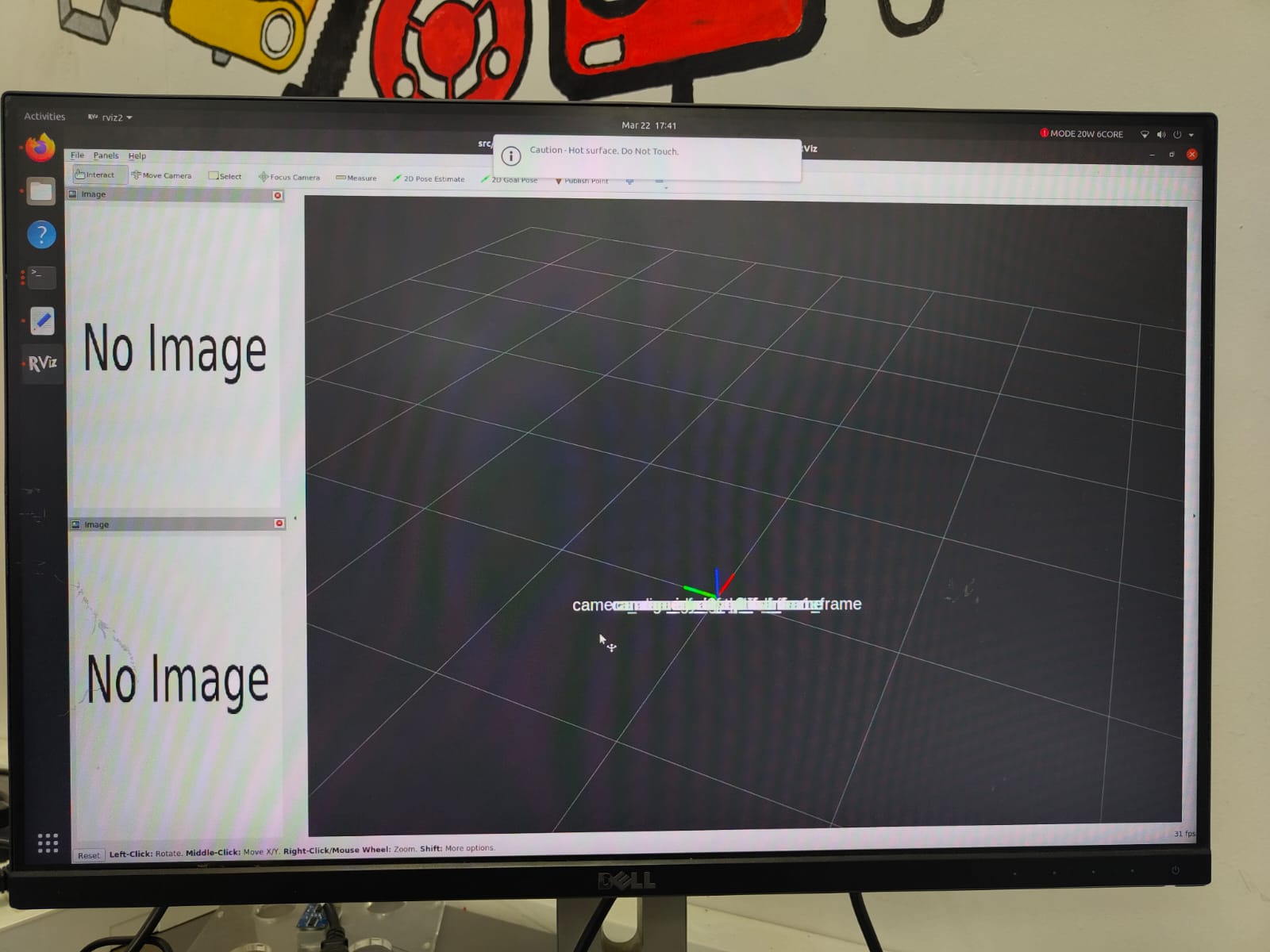
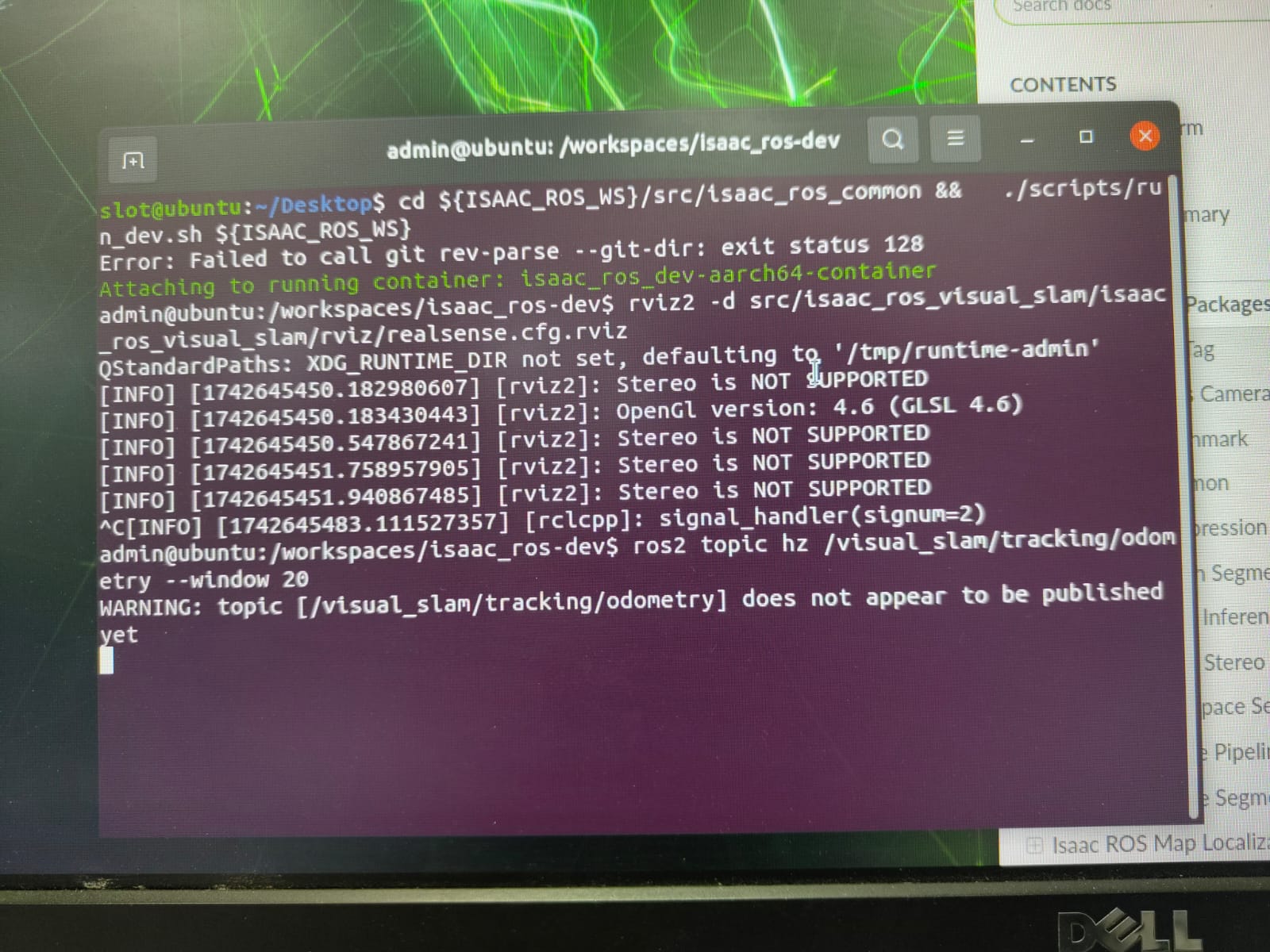
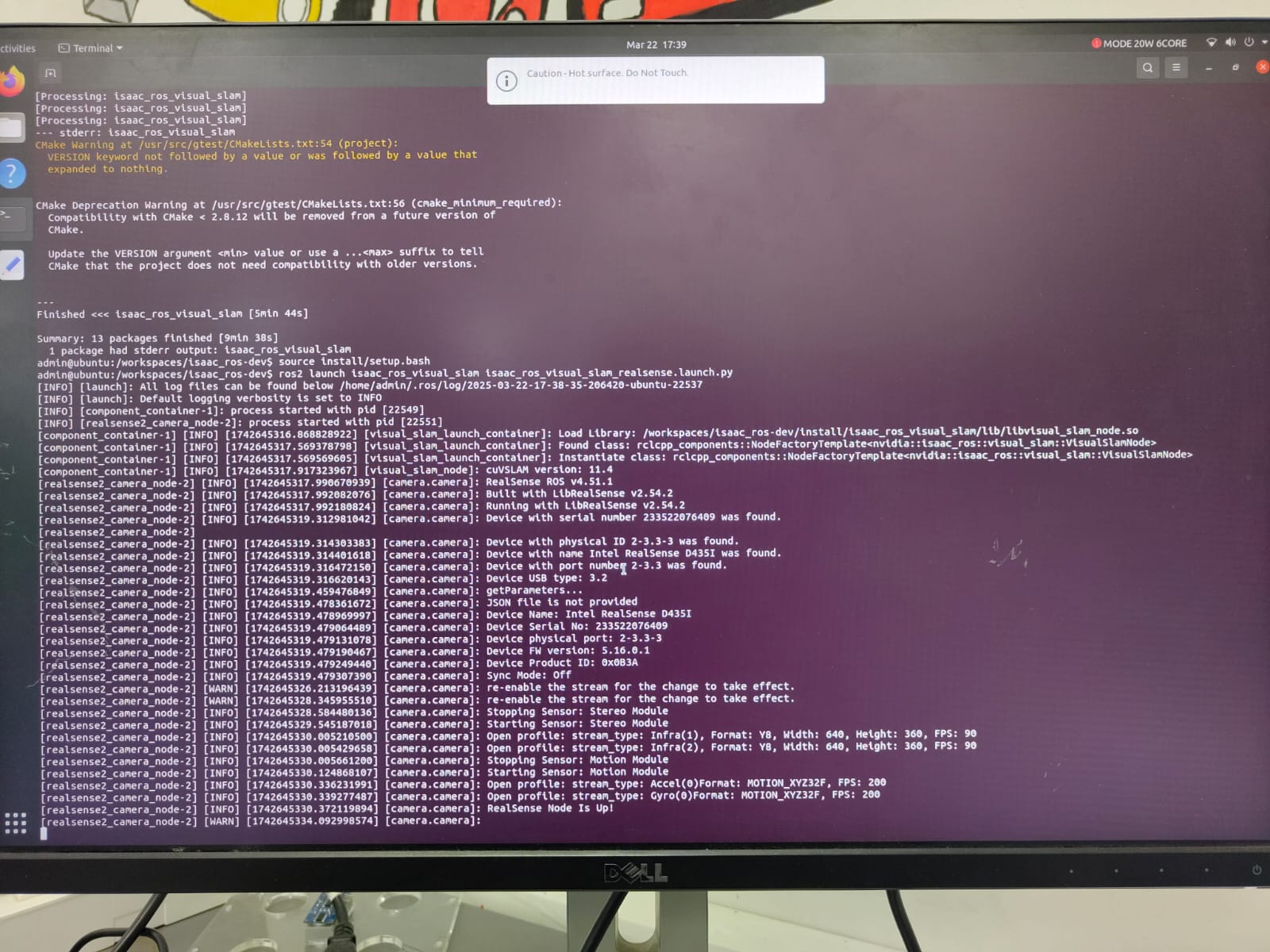
anyways we were able to launch the vslam example with the realsense camera, yet we are not receiving any vslam output
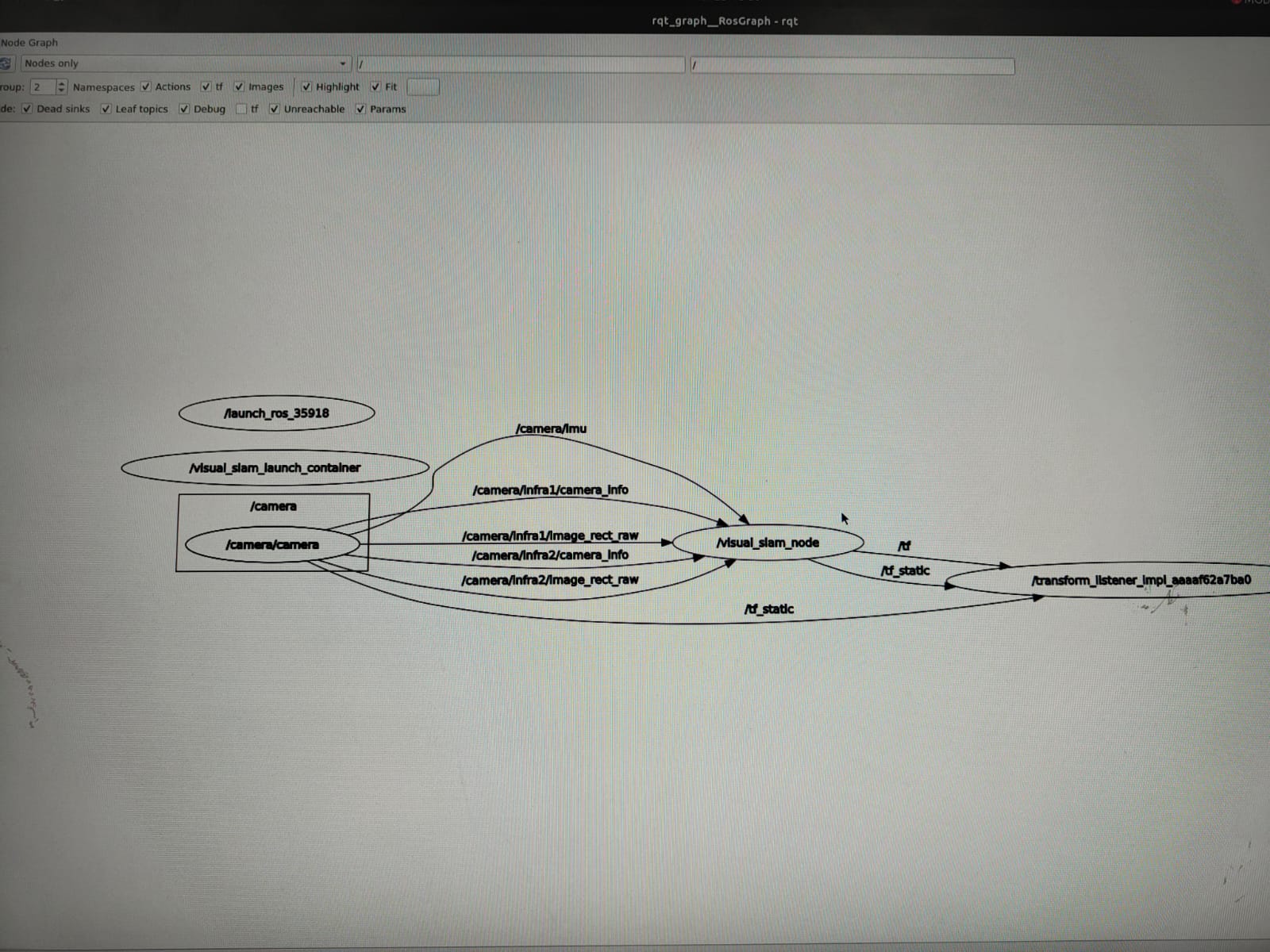
these are the topics that are being displayed
topiclist.txt (1.4 KB)
and when we tried to check with running ros2 topic hz /camera/infra1/image_rect_raw --window 20
and ros2 topic hz /camera/imu --window 20 there was no output from the terminal
then i followed the troubleshooting guide in the documentation, I can see any IR images by Realsense-viewer if clicked IR camera. the trouble shooting solution section contained instructions to download dkms , but the download link is not for jetson, arm based systems but for x86 systems
i have seen another person in the forum who faced the exact same issue i am currently facing :
this
unfortunately it seems there wasn’t a solution reached yet, i hope you can look into this
here i have provided the logs when i launched the isaac ros vslam realsense, rviz visualization launch and the topic list, along with images
realsense.txt (4.1 KB)
rviz.txt (768 Bytes)