I am trying to follow the simple joint control with jupyter notebook example after successfully setting-up the Isaac Omniverse simulator 2020.1 on a remote workstation using a Docker container, deploying the simple_joint_control package in my local machine and opening the jupyter notebook (also in my local machine).
Both applications (remote and local) report to connect to each other correctly. Remote:
2020-08-11 12:45:49.075 INFO engine/alice/components/TcpPublisher.cpp@146: TCP publisher successfully accepted connection
2020-08-11 12:45:49.215 INFO engine/alice/components/TcpSubscriber.cpp@170: Successfully connected to remote (10.0.0.53:55001). Will start receiving.
Local:
2020-08-11 13:45:49.074 INFO engine/alice/components/TcpSubscriber.cpp@170: Successfully connected to remote (10.0.1.136:55000). Will start receiving.
2020-08-11 13:45:49.216 INFO engine/alice/components/TcpPublisher.cpp@146: TCP publisher successfully accepted connection
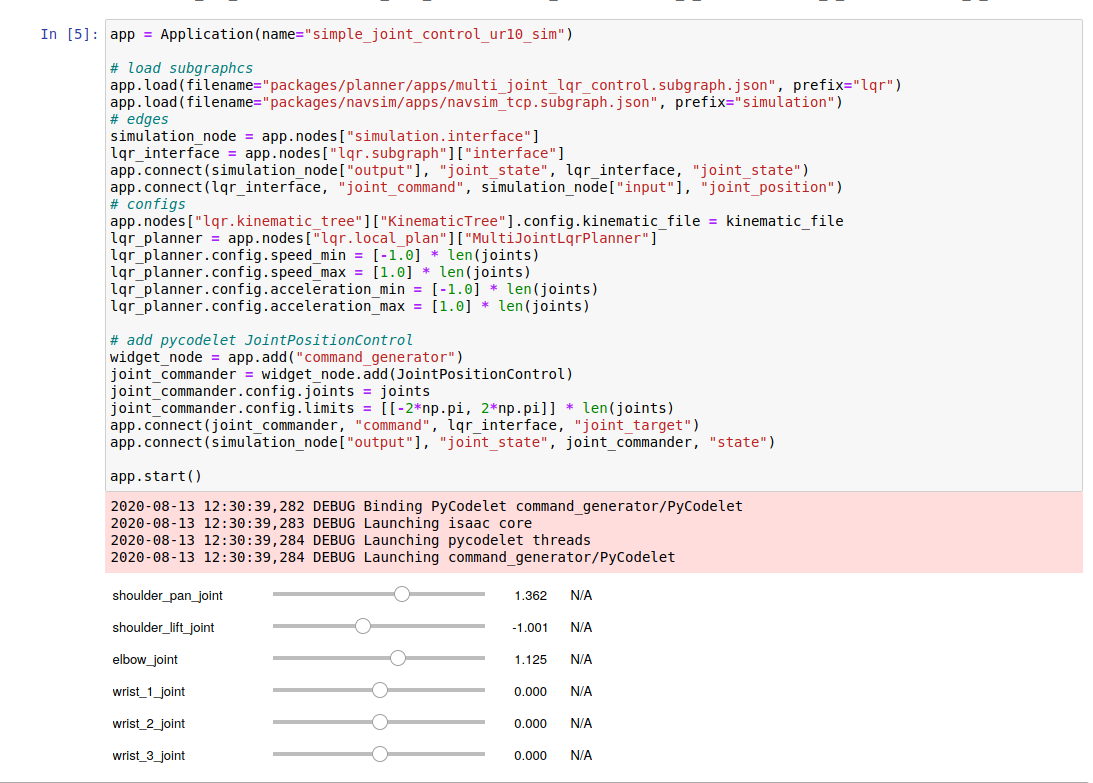
However, while moving the sliders in the jupyter notebook the robot model remains still in the start position. The application graph on each side are as follows:
isaacsim.app.json
{
"name": "isaacsim",
"modules": [],
"graph": {
"nodes": [
{
"name": "interface",
"components": [
{
"name": "ledger",
"type": "isaac::alice::MessageLedger"
},
{
"name": "input",
"type": "isaac::alice::TcpSubscriber"
},
{
"name": "output",
"type": "isaac::alice::TcpPublisher"
},
{
"name": "time_sync",
"type": "isaac::alice::TimeSynchronizer"
}
]
}
],
"edges": []
},
"config": {
"interface": {
"input": {
"port": 55001,
"host": "10.0.0.53"
},
"output": {
"port": 55000
}
}
}
}
navsim_tcp.subgraph.json:
{
"modules": [
"navsim"
],
"graph": {
"nodes": [
{
"name": "interface",
"components": [
{
"name": "ledger",
"type": "isaac::alice::MessageLedger"
},
{
"name": "input",
"type": "isaac::alice::TcpSubscriber"
},
{
"name": "output",
"type": "isaac::alice::TcpPublisher"
},
{
"name": "time_sync",
"type": "isaac::alice::TimeSynchronizer"
}
]
},
{
"name": "scenario_manager",
"components": [
{
"name": "ledger",
"type": "isaac::alice::MessageLedger"
},
{
"name": "scenario_manager",
"type": "isaac::navsim::ScenarioManager"
}
]
}
],
"edges": [
{
"source": "scenario_manager/scenario_manager/scenario_control",
"target": "interface/input/scenario_control"
},
{
"source": "scenario_manager/scenario_manager/robot",
"target": "interface/input/scenario_actors"
},
{
"source": "interface/output/scenario_reply",
"target": "scenario_manager/scenario_manager/scenario_reply"
}
]
},
"config": {
"interface": {
"input": {
"port": 55000,
"host": "10.0.1.136"
},
"output": {
"port": 55001
}
},
"scenario_manager": {
"scenario_manager": {
"ref_pose_name": "unity"
}
}
}
}
The following errors are shown at the local side:
2020-08-11 13:45:48.911 ERROR engine/alice/components/Config.cpp@70: Could not find hook: command_generator/PyCodelet/joints
2020-08-11 13:45:48.911 ERROR engine/alice/components/Config.cpp@70: Could not find hook: command_generator/PyCodelet/limits
The remote side just shows some warnings that I can add later if they are believe to be relevant. Thank you in advance for any help provided.