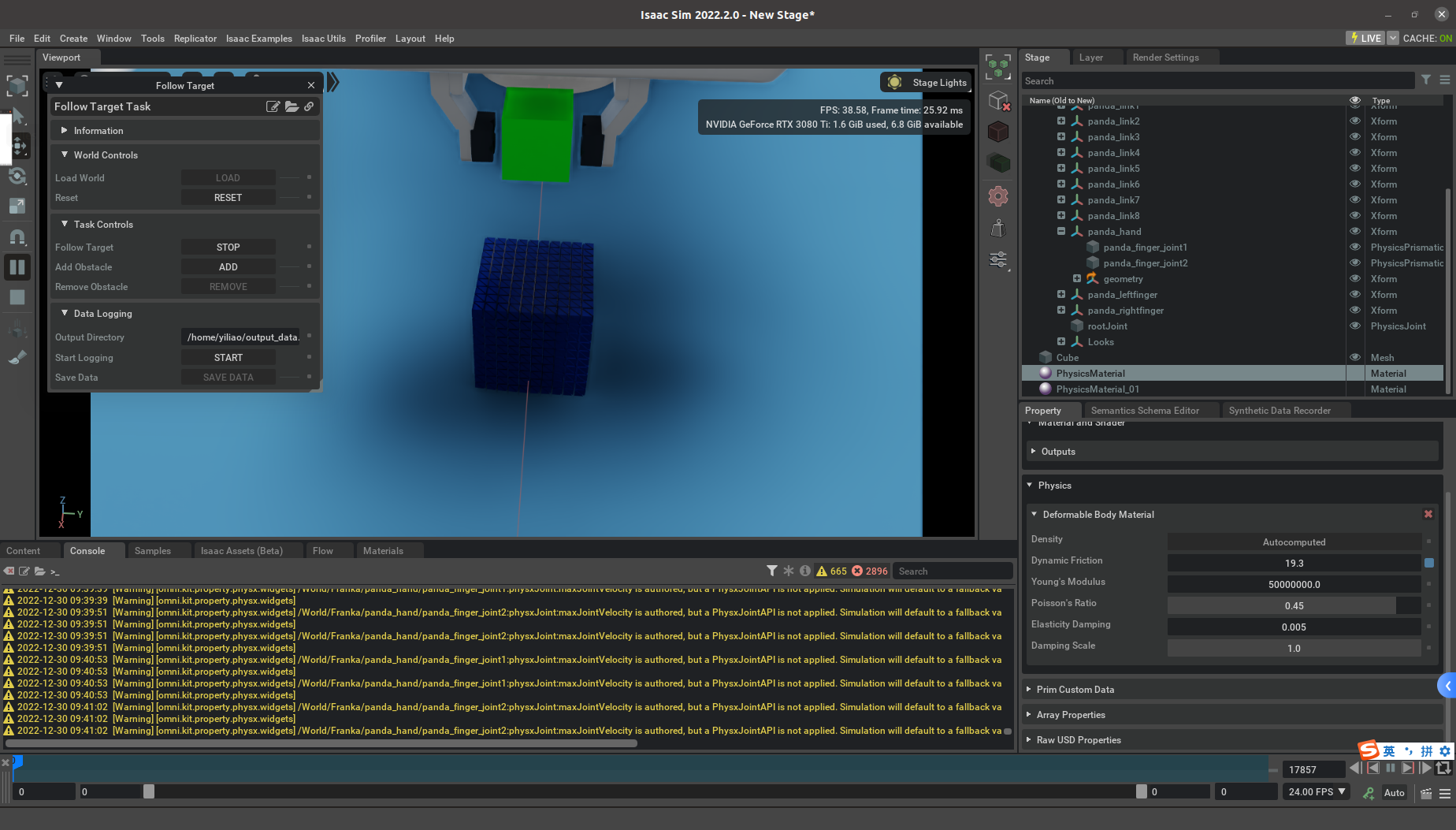
I want to simulate a gripper grasping a deformable object. But the deformable object slipped from the gripper.
The Franka robot model is from the <Follow Target> in <Isaac Examples>. The deformable object is a cube created by Isaac. I tried to set a large “Dynamic Friction” value in “Deformable Body Material” which the deformable object used. Meanwhile, “Static Friction” and “Dynamic Friction” in “Rigid Body Material” which the “panda_leftfinger” and “panda_rightfinger” used also have large values. The gripper in Franka still failed to grasp the deformable object. The deformable object was still on the ground plane.
How can I simulate the gripper grasping the deformable object successfully?
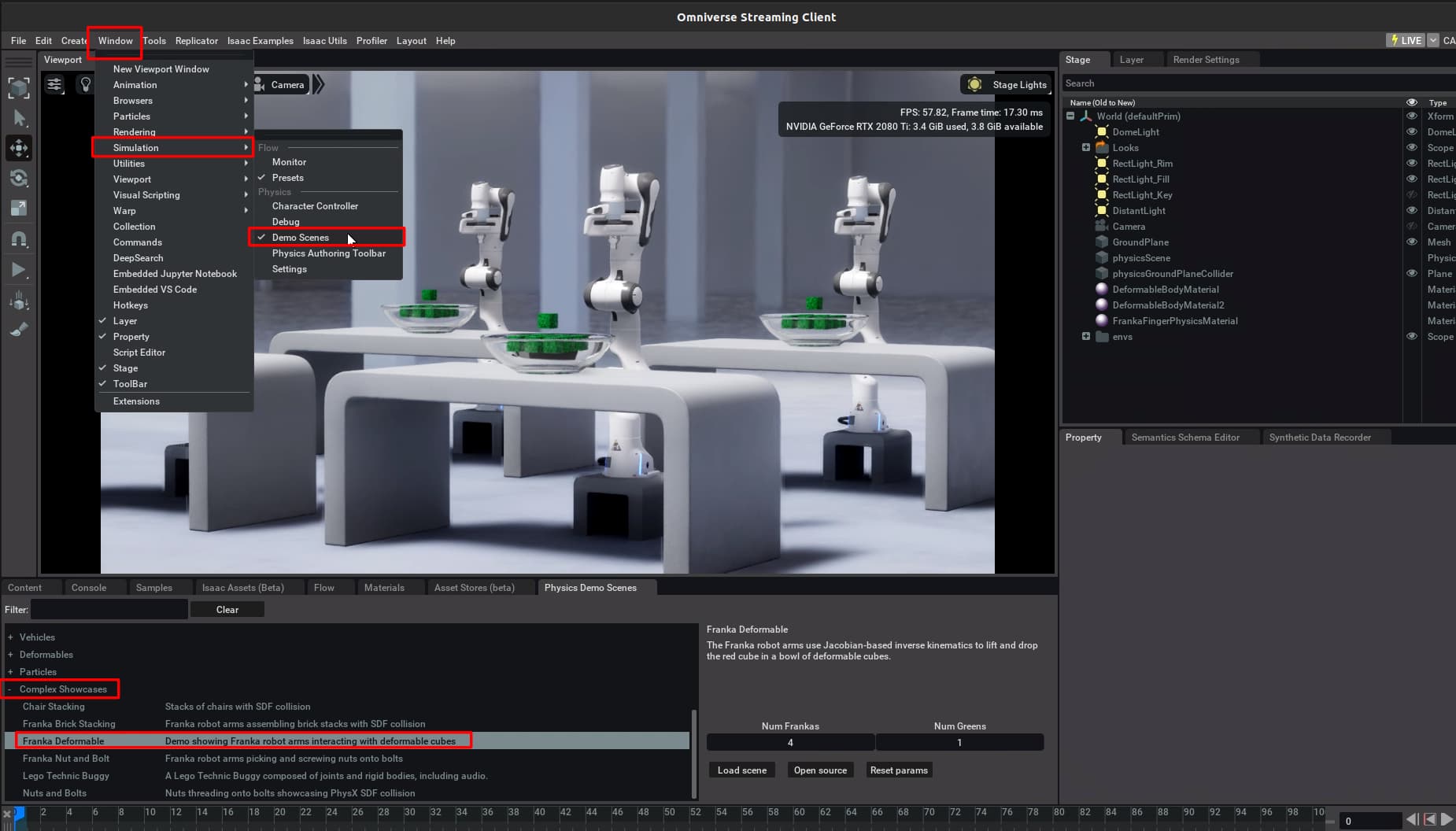
I encourage you to take a look at the Franka Deformable physics demo and inspect the physicsScene properties, deformable materials, and other elements that may help you to adjust your simulation setup better.
I tried to open the <Franka Deformable> in <Complex Showcases> from <Demo Scenes> but failed. Any Demos in <Complex Showcases> not able to be opened. The Demos in other directories can run successfully, such as <Deformables> and <Rigid Bodies>.
The Screenshot when the issue occurred is shown below. I couldn’t do any operation in Isaac Sim. Isaac Sim seemed to have no response, So I had to force quit the Isaac Sim.