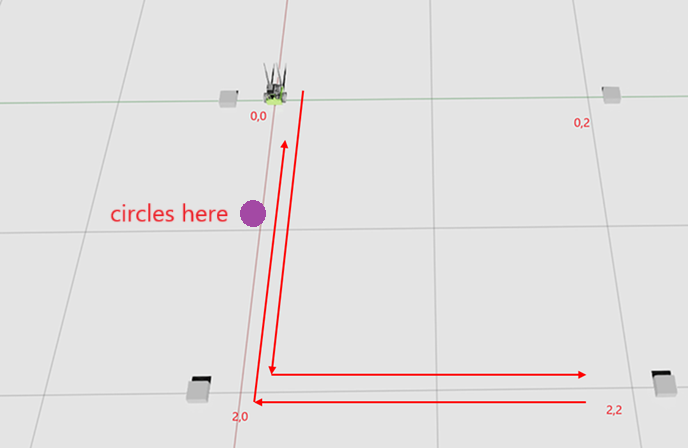
I did some more research. I changed the goal from 0,0 → 2,0 → 2,2 → 2,0 → 0,0.
0,0
2,0
2,2
This time, the robot starts circling while going from 2,0 → 0,0.
So, it looks like navigating from bottom to top is causing some issues.
Any thoughts?