Hello everyone.
I posted an issue about Isaac Cortex here, but by the time I found the solution the topic was already closed.
I’m posting this so if anyone had the same problem it might be a help.
First, I should mention that the simulation example of cortex runs perfectly and my problem was only for the physical robot example.
For solving this issue, I had to make some changes in the source codes. I think the problem is caused because of this reason: cortex_ros requires 9 numbers as joint positions, but the physical robot (in my case at least) only sends 7 (finger joints not included). This will then result in cortex getting suppressed.
Below, you can find the changes I made to the files.
set_high_collision_thresholds.py:
Instead of franka_ros.srv, the packages must be imported from franka_msgs.srv

cortex_ros_utils.py:
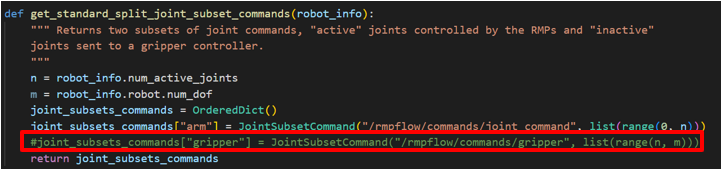
cortex_ros.py:



And finally, in the articulation_view.py from Omniverse extensions:

I hope it’s clear what I’ve done.
The problem now is that the gripper commands don’t work, but the arm follows the commands perfectly.