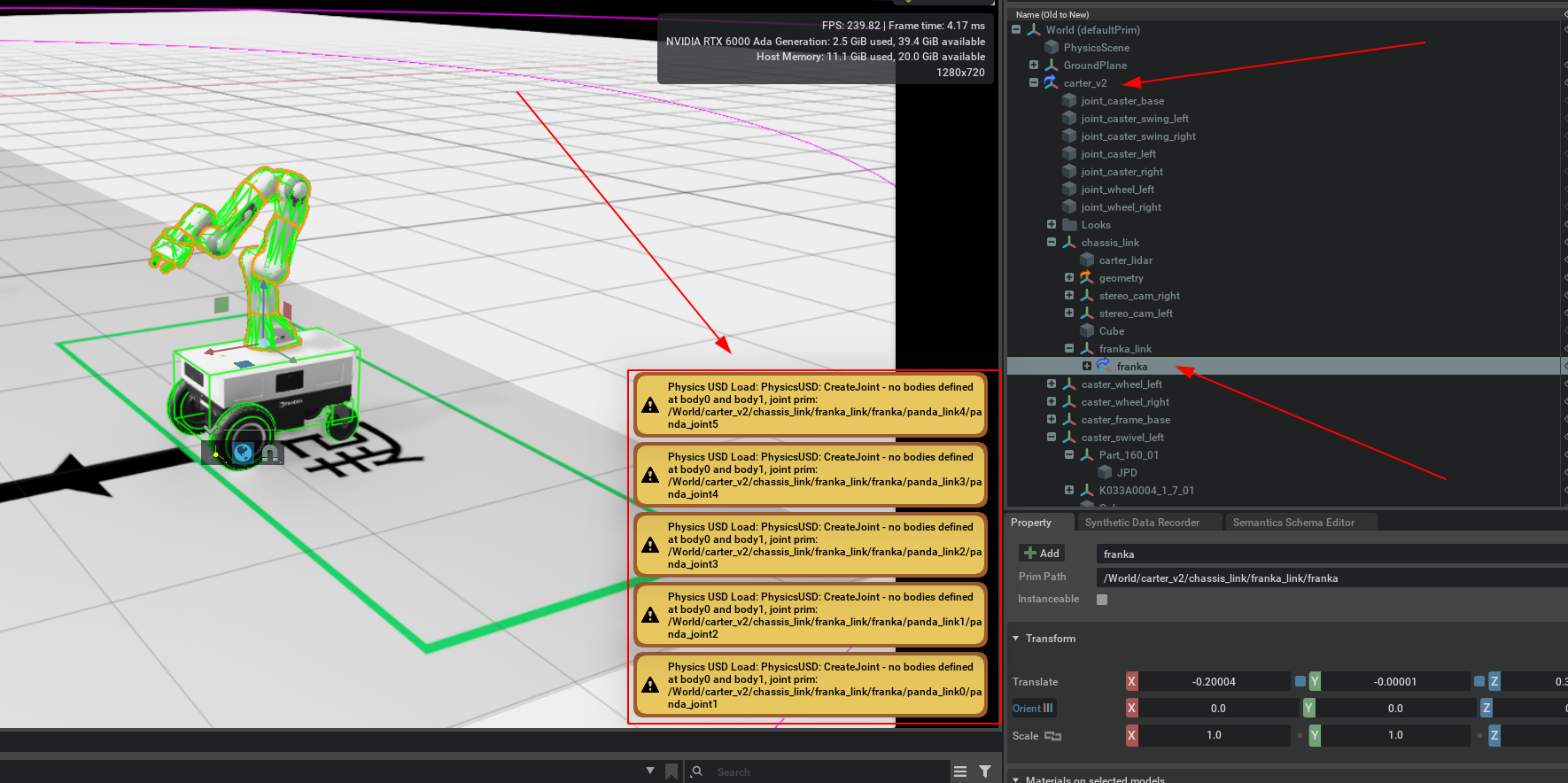
Hi, I put the robotic arm into the robot asset and click on play. The following question will appear. How should I set it up?
Hi,
this is most likely because you nested rigid bodies, so the nested rigid bodies were not create. Nesting rigid bodies is not allowed because in USD there is a local transformation stack, so we really dont know the order.
To simulate something like this, what you can do is to put both robots on the same level in the USD hierarchy and connect them with a fixed joint.
You can either exclude the joint from the articulation (there is a bool on the joint) - this way two articulations will be created that are connected through a maximum coordinate joint. Or you dont exclude it, in which case one articulation is created for the whole topology.
Regards,
Ales
Hello. Did you fixed this problem??
Hello, I try to use fixed joints to connect, but there will be a situation where the mobile robot arm cannot move normally. The specific performance is that the wheels rotate but the mobile base will not move forward. I don’t know exactly where the problem is, can you tell me how to connect the mobile base and the robotic arm?Thank you
Yes, this should be possible, but I think you are still creating the fixed articulation.
So steps should be:
- Select the root joint on the Franka and disable the root joint in the properties window
- Select the root link of the robot below and frankas first link
- Right click → create → physics → joint → fixed
Run simulation.
See the attached video:
Hope that helps,
Regards,
Ales
Sorry for replying to you so late. This is indeed useful for adding a manipulator to a four-wheeled car. But when I tried to use jetbot to add a manipulator, the system clicked to run, and the entire car and manipulator would disintegrate. At first, I thought the manipulator was too big, so I removed the manipulator. Scaled down, but the system still disintegrates. The error reported is:
2023-09-05 11:33:07 [859,994ms] [Warning] [omni.physx.plugin] Invalid PhysX transform detected for /World/franka/panda_link0.
2023-09-05 11:33:07 [860,396ms] [Warning] [omni.kit.notification_manager.manager] PhysX error: Illegal BroadPhaseUpdateData
@AlesBorovicka thank you for your help
The simulation fails, the setup is not right.
Can you share your assets? If not please make sure to check the video and follow the steps carefully especially the one removing the fixed joint so that the simulation works correctly.
Sorry, I can’t share the shared assets directly, because I open the jetbot’s assets through example and control its progress. Currently, I open the example directly, and then add the manipulator to the jetbot, and it disintegrates. Here’s my video hookup: https://youtu.be/3L5gSSw_Pvk.I previously tried to combine the two first, but found that whenever the click started, the whole thing would lean forward and eventually fall to the ground, no matter how much I scaled the manipulator down.Thanks.@AlesBorovicka
Hmm could it be that the bases are colliding? Can you try to move the Franka more up to make sure it does not collide with the rest?
You can also try to keep the fixed joint to be part of the articulation (do not exclude from articulation), this way one articulation is created and the parts wont collide with each other. If you plan to simulate both robots as one part then you might want to include the new fixed joint into the articulation.
Thank you for your timely reply. I followed the two methods you mentioned: raising the manipulator or keeping the fixed joint to be part of the articulation but unfortunately the results were the same as before. But I don’t know why this is happening. Thank you.@AlesBorovicka
The following is the code in the example I wrote myself.
hello_world_extension.py (1.2 KB)
I was able to repro the issue, looks like there is a problem with the quite large mass difference between the robots.
However this goes away if I keep the fixed joint to be part of the articulation.
So the fixed joint between the Franka and the other robot is not excluded from the articulation. Then the simulation works fine for me, is it the same on your side?
Sorry, there may be something wrong with my operation. The same problem occurred when the fixed joints between Franka and other robots were not excluded from the joints. Can you see how you do it? The mass difference you mentioned is quite large, can I manually change the mass parameters of these two objects?thank you very much for your help. @AlesBorovicka
Sorry was on PTO, yes you can change the mass by selecting the rigid body (you can even filter rigid bodies in the filter option of stage window). There each rigid body does have a mass part, there you can change the mass.
So can I change the mass of the robotic arm by changing the scale?
Can you see how you get the nice simulation effect you mentioned above by not excluding joints?
Thank you for your help, sorry for replying so late. @AlesBorovicka
Scaling wont change anything, because the mass is explicitly set as mass not density (that derives from size), nut you can change it.
Thats the same workflow, the only exception, that the fixed joint you create between the two robots you dont exclude it from the articulation.
我已经放弃使用该软件, 由于本人能力受限,或者这个软件bug太多了
Hi @904798869 - Can you share a list of bugs that you are seeing after using the latest Isaac Sim release?
我已经卸载了,sorry
Do not give up, bro
硬件不支持,4080显卡都经常崩掉,鼠标一直转圈圈,体验不行,这不是贫民用的软件,bro