I need some help to preview my gmsl camera on xavier, jetson linux version 32.5.1.
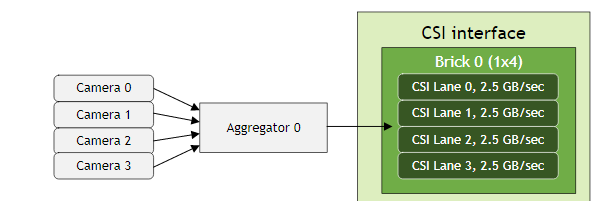
i have set the max96712 as 2x4 mode. All 4 cameras signals are output to CSI-A and CSI-B (lane0-lane3) with virtual channel 0,1,2,3
I only insert the first camera, and I can Detected mipi data in CSI-A and CSI-B (lane0-lane3). But I can’t preview the camera.
the preview command is:
gst-launch-1.0 v4l2src device=/dev/video0 ! ‘video/x-raw, format=UYVY, width=1920, height=1200, framerate=30/1’ ! xvimagesink -ev
Below is the error log:
dmesg.log (4.6 KB)
trace.log (34.4 KB)
I have referred to some other similar posts and made some changes to the DTS, but the issue has not been resolved yet.
I haven’t set a virtual channel before ,I don’t know where the problem is, please help me to solve the problem.thanks.
the dts:
/ {
host1x {
vi@15c10000 {
num-channels = <4>;
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
ar0233_vi_in0: endpoint {
vc-id = <0>;
port-index = <0>;
bus-width = <4>;
remote-endpoint = <&ar0233_csi_out0>;
};
};
port@1 {
reg = <1>;
ar0233_vi_in1: endpoint {
vc-id = <1>;
port-index = <0>;
bus-width = <4>;
remote-endpoint = <&ar0233_csi_out1>;
};
};
port@2 {
reg = <2>;
ar0233_vi_in2: endpoint {
vc-id = <2>;
port-index = <0>;
bus-width = <4>;
remote-endpoint = <&ar0233_csi_out2>;
};
};
port@3 {
reg = <3>;
ar0233_vi_in3: endpoint {
vc-id = <3>;
port-index = <0>;
bus-width = <4>;
remote-endpoint = <&ar0233_csi_out3>;
};
};
/*
port@4 {
reg = <4>;
ar0233_vi_in4: endpoint {
vc-id = <0>;
port-index = <4>;
bus-width = <2>;
remote-endpoint = <&ar0233_csi_out4>;
};
};
port@5 {
reg = <5>;
ar0233_vi_in5: endpoint {
vc-id = <0>;
port-index = <5>;
bus-width = <2>;
remote-endpoint = <&ar0233_csi_out5>;
};
};
*/
};
};
nvcsi@15a00000 {
num-channels = <4>;
#address-cells = <1>;
#size-cells = <0>;
channel@0 {
reg = <0>;
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
ar0233_csi_in0: endpoint@0 {
port-index = <0>;
bus-width = <4>;
remote-endpoint = <&ar0233_ar0233_out0>;
};
};
port@1 {
reg = <1>;
ar0233_csi_out0: endpoint@1 {
remote-endpoint = <&ar0233_vi_in0>;
};
};
};
};
channel@1 {
reg = <1>;
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
ar0233_csi_in1: endpoint@2 {
port-index = <0>;
bus-width = <4>;
remote-endpoint = <&ar0233_ar0233_out1>;
};
};
port@1 {
reg = <1>;
ar0233_csi_out1: endpoint@3 {
remote-endpoint = <&ar0233_vi_in1>;
};
};
};
};
channel@2 {
reg = <2>;
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
ar0233_csi_in2: endpoint@4 {
port-index = <0>;
bus-width = <4>;
remote-endpoint = <&ar0233_ar0233_out2>;
};
};
port@1 {
reg = <1>;
ar0233_csi_out2: endpoint@5 {
remote-endpoint = <&ar0233_vi_in2>;
};
};
};
};
channel@3 {
reg = <3>;
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
ar0233_csi_in3: endpoint@6 {
port-index = <0>;
bus-width = <4>;
remote-endpoint = <&ar0233_ar0233_out3>;
};
};
port@1 {
reg = <1>;
ar0233_csi_out3: endpoint@7 {
remote-endpoint = <&ar0233_vi_in3>;
};
};
};
};
};
};
i2c@3180000 {
imx390_a@1b {
compatible = "nvidia,imx390";
reg = <0x1b>;
/* Physical dimensions of sensor */
physical_w = "15.0";
physical_h = "12.5";
sensor_model ="imx390";
/* Defines number of frames to be dropped by driver internally after applying */
/* sensor crop settings. Some sensors send corrupt frames after applying */
/* crop co-ordinates */
post_crop_frame_drop = "0";
/* Convert Gain to unit of dB (decibel) befor passing to kernel driver */
use_decibel_gain = "true";
/* enable CID_SENSOR_MODE_ID for sensor modes selection */
use_sensor_mode_id = "true";
/**
* A modeX node is required to support v4l2 driver
* implementation with NVIDIA camera software stack
*
* mclk_khz = "";
* Standard MIPI driving clock, typically 24MHz
*
* num_lanes = "";
* Number of lane channels sensor is programmed to output
*
* tegra_sinterface = "";
* The base tegra serial interface lanes are connected to
*
* vc_id = "";
* The virtual channel id of the sensor.
*
* discontinuous_clk = "";
* The sensor is programmed to use a discontinuous clock on MIPI lanes
*
* dpcm_enable = "true";
* The sensor is programmed to use a DPCM modes
*
* cil_settletime = "";
* MIPI lane settle time value.
* A "0" value attempts to autocalibrate based on mclk_khz and pix_clk_hz
*
* active_w = "";
* Pixel active region width
*
* active_h = "";
* Pixel active region height
*
* dynamic_pixel_bit_depth = "";
* sensor dynamic bit depth for sensor mode
*
* csi_pixel_bit_depth = "";
* sensor output bit depth for sensor mode
*
* mode_type="";
* Sensor mode type, For eg: yuv, Rgb, bayer, bayer_wdr_pwl
*
* pixel_phase="";
* Pixel phase for sensor mode, For eg: rggb, vyuy, rgb888
*
* readout_orientation = "0";
* Based on camera module orientation.
* Only change readout_orientation if you specifically
* Program a different readout order for this mode
*
* line_length = "";
* Pixel line length (width) for sensor mode.
* This is used to calibrate features in our camera stack.
*
* pix_clk_hz = "";
* Sensor pixel clock used for calculations like exposure and framerate
*
*
*
*
* inherent_gain = "";
* Gain obtained inherently from mode (ie. pixel binning)
*
* min_gain_val = ""; (floor to 6 decimal places)
* max_gain_val = ""; (floor to 6 decimal places)
* Gain limits for mode
* if use_decibel_gain = "true", please set the gain as decibel
*
* min_exp_time = ""; (ceil to integer)
* max_exp_time = ""; (ceil to integer)
* Exposure Time limits for mode (us)
*
*
* min_hdr_ratio = "";
* max_hdr_ratio = "";
* HDR Ratio limits for mode
*
* min_framerate = "";
* max_framerate = "";
* Framerate limits for mode (fps)
*
* embedded_metadata_height = "";
* Sensor embedded metadata height in units of rows.
* If sensor does not support embedded metadata value should be 0.
*/
mode0 {/*mode IMX390_MODE_1920X1080_CROP_30FPS*/
mclk_khz = "24000";
num_lanes = "4";
tegra_sinterface = "serial_a";
vc_id = "0";
discontinuous_clk = "no";
dpcm_enable = "false";
cil_settletime = "0";
dynamic_pixel_bit_depth = "16";
csi_pixel_bit_depth = "16";
mode_type = "yuv";
pixel_phase = "uyvy";
active_w = "1920";
active_h = "1200";
readout_orientation = "0";
line_length = "1920";
inherent_gain = "1";
pix_clk_hz = "350000000";
serdes_pix_clk_hz = "350000000";
gain_factor = "10";
min_gain_val = "0"; /* dB */
max_gain_val = "300"; /* dB */
step_gain_val = "3"; /* 0.3 */
default_gain = "0";
min_hdr_ratio = "1";
max_hdr_ratio = "1";
framerate_factor = "1";
min_framerate = "1";
max_framerate = "30";
step_framerate = "1";
default_framerate = "30";
exposure_factor = "1000000";
min_exp_time = "59"; /*us, 2 lines*/
max_exp_time = "33333";
step_exp_time = "1";
default_exp_time = "33333";/* us */
embedded_metadata_height = "0";
};
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
ar0233_ar0233_out0: endpoint {
vc-id = <0>;
port-index = <0>;
bus-width = <4>;
remote-endpoint = <&ar0233_csi_in0>;
};
};
};
gmsl-link {
src-csi-port = "a";
dst-csi-port = "a";
serdes-csi-link = "a";
csi-mode = "1x4";
st-vc = <0>;
vc-id = <0>;
num-lanes = <4>;
streams = "ued-u1", "raw12";
};
};
imx390_b@1c {
compatible = "nvidia,imx390";
reg = <0x1c>;
/* Physical dimensions of sensor */
physical_w = "15.0";
physical_h = "12.5";
sensor_model ="imx390";
/* Defines number of frames to be dropped by driver internally after applying */
/* sensor crop settings. Some sensors send corrupt frames after applying */
/* crop co-ordinates */
post_crop_frame_drop = "0";
/* Convert Gain to unit of dB (decibel) befor passing to kernel driver */
use_decibel_gain = "true";
/* enable CID_SENSOR_MODE_ID for sensor modes selection */
use_sensor_mode_id = "true";
/**
* A modeX node is required to support v4l2 driver
* implementation with NVIDIA camera software stack
*
* mclk_khz = "";
* Standard MIPI driving clock, typically 24MHz
*
* num_lanes = "";
* Number of lane channels sensor is programmed to output
*
* tegra_sinterface = "";
* The base tegra serial interface lanes are connected to
*
* vc_id = "";
* The virtual channel id of the sensor.
*
* discontinuous_clk = "";
* The sensor is programmed to use a discontinuous clock on MIPI lanes
*
* dpcm_enable = "true";
* The sensor is programmed to use a DPCM modes
*
* cil_settletime = "";
* MIPI lane settle time value.
* A "0" value attempts to autocalibrate based on mclk_khz and pix_clk_hz
*
* active_w = "";
* Pixel active region width
*
* active_h = "";
* Pixel active region height
*
* dynamic_pixel_bit_depth = "";
* sensor dynamic bit depth for sensor mode
*
* csi_pixel_bit_depth = "";
* sensor output bit depth for sensor mode
*
* mode_type="";
* Sensor mode type, For eg: yuv, Rgb, bayer, bayer_wdr_pwl
*
* pixel_phase="";
* Pixel phase for sensor mode, For eg: rggb, vyuy, rgb888
*
* readout_orientation = "0";
* Based on camera module orientation.
* Only change readout_orientation if you specifically
* Program a different readout order for this mode
*
* line_length = "";
* Pixel line length (width) for sensor mode.
* This is used to calibrate features in our camera stack.
*
* pix_clk_hz = "";
* Sensor pixel clock used for calculations like exposure and framerate
*
*
*
*
* inherent_gain = "";
* Gain obtained inherently from mode (ie. pixel binning)
*
* min_gain_val = ""; (floor to 6 decimal places)
* max_gain_val = ""; (floor to 6 decimal places)
* Gain limits for mode
* if use_decibel_gain = "true", please set the gain as decibel
*
* min_exp_time = ""; (ceil to integer)
* max_exp_time = ""; (ceil to integer)
* Exposure Time limits for mode (us)
*
*
* min_hdr_ratio = "";
* max_hdr_ratio = "";
* HDR Ratio limits for mode
*
* min_framerate = "";
* max_framerate = "";
* Framerate limits for mode (fps)
*
* embedded_metadata_height = "";
* Sensor embedded metadata height in units of rows.
* If sensor does not support embedded metadata value should be 0.
*/
mode0 {/*mode IMX390_MODE_1920X1080_CROP_30FPS*/
mclk_khz = "24000";
num_lanes = "4";
tegra_sinterface = "serial_b";
vc_id = "1";
discontinuous_clk = "no";
dpcm_enable = "false";
cil_settletime = "0";
dynamic_pixel_bit_depth = "16";
csi_pixel_bit_depth = "16";
mode_type = "yuv";
pixel_phase = "uyvy";
active_w = "1920";
active_h = "1200";
readout_orientation = "0";
line_length = "1920";
inherent_gain = "1";
pix_clk_hz = "87500000";
serdes_pix_clk_hz = "350000000";
gain_factor = "10";
min_gain_val = "0"; /* dB */
max_gain_val = "300"; /* dB */
step_gain_val = "3"; /* 0.3 */
default_gain = "0";
min_hdr_ratio = "1";
max_hdr_ratio = "1";
framerate_factor = "1";
min_framerate = "1";
max_framerate = "30";
step_framerate = "1";
default_framerate = "30";
exposure_factor = "1000000";
min_exp_time = "59"; /*us, 2 lines*/
max_exp_time = "33333";
step_exp_time = "1";
default_exp_time = "33333";/* us */
embedded_metadata_height = "0";
};
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
ar0233_ar0233_out1: endpoint {
vc-id = <1>;
port-index = <0>;
bus-width = <4>;
remote-endpoint = <&ar0233_csi_in1>;
};
};
};
gmsl-link {
src-csi-port = "b";
dst-csi-port = "a";
serdes-csi-link = "a";
csi-mode = "1x4";
st-vc = <0>;
vc-id = <1>;
num-lanes = <4>;
streams = "ued-u1", "raw12";
};
};
imx390_c@1d {
compatible = "nvidia,imx390";
reg = <0x1d>;
/* Physical dimensions of sensor */
physical_w = "15.0";
physical_h = "12.5";
sensor_model ="imx390";
/* Defines number of frames to be dropped by driver internally after applying */
/* sensor crop settings. Some sensors send corrupt frames after applying */
/* crop co-ordinates */
post_crop_frame_drop = "0";
/* Convert Gain to unit of dB (decibel) befor passing to kernel driver */
use_decibel_gain = "true";
/* enable CID_SENSOR_MODE_ID for sensor modes selection */
use_sensor_mode_id = "true";
/**
* A modeX node is required to support v4l2 driver
* implementation with NVIDIA camera software stack
*
* mclk_khz = "";
* Standard MIPI driving clock, typically 24MHz
*
* num_lanes = "";
* Number of lane channels sensor is programmed to output
*
* tegra_sinterface = "";
* The base tegra serial interface lanes are connected to
*
* vc_id = "";
* The virtual channel id of the sensor.
*
* discontinuous_clk = "";
* The sensor is programmed to use a discontinuous clock on MIPI lanes
*
* dpcm_enable = "true";
* The sensor is programmed to use a DPCM modes
*
* cil_settletime = "";
* MIPI lane settle time value.
* A "0" value attempts to autocalibrate based on mclk_khz and pix_clk_hz
*
* active_w = "";
* Pixel active region width
*
* active_h = "";
* Pixel active region height
*
* dynamic_pixel_bit_depth = "";
* sensor dynamic bit depth for sensor mode
*
* csi_pixel_bit_depth = "";
* sensor output bit depth for sensor mode
*
* mode_type="";
* Sensor mode type, For eg: yuv, Rgb, bayer, bayer_wdr_pwl
*
* pixel_phase="";
* Pixel phase for sensor mode, For eg: rggb, vyuy, rgb888
*
* readout_orientation = "0";
* Based on camera module orientation.
* Only change readout_orientation if you specifically
* Program a different readout order for this mode
*
* line_length = "";
* Pixel line length (width) for sensor mode.
* This is used to calibrate features in our camera stack.
*
* pix_clk_hz = "";
* Sensor pixel clock used for calculations like exposure and framerate
*
*
*
*
* inherent_gain = "";
* Gain obtained inherently from mode (ie. pixel binning)
*
* min_gain_val = ""; (floor to 6 decimal places)
* max_gain_val = ""; (floor to 6 decimal places)
* Gain limits for mode
* if use_decibel_gain = "true", please set the gain as decibel
*
* min_exp_time = ""; (ceil to integer)
* max_exp_time = ""; (ceil to integer)
* Exposure Time limits for mode (us)
*
*
* min_hdr_ratio = "";
* max_hdr_ratio = "";
* HDR Ratio limits for mode
*
* min_framerate = "";
* max_framerate = "";
* Framerate limits for mode (fps)
*
* embedded_metadata_height = "";
* Sensor embedded metadata height in units of rows.
* If sensor does not support embedded metadata value should be 0.
*/
mode0 {/*mode IMX390_MODE_1920X1080_CROP_30FPS*/
mclk_khz = "24000";
num_lanes = "4";
tegra_sinterface = "serial_c";
vc_id = "2";
discontinuous_clk = "no";
dpcm_enable = "false";
cil_settletime = "0";
dynamic_pixel_bit_depth = "16";
csi_pixel_bit_depth = "16";
mode_type = "yuv";
pixel_phase = "uyvy";
active_w = "1920";
active_h = "1200";
readout_orientation = "0";
line_length = "1920";
inherent_gain = "1";
pix_clk_hz = "87500000";
serdes_pix_clk_hz = "350000000";
gain_factor = "10";
min_gain_val = "0"; /* dB */
max_gain_val = "300"; /* dB */
step_gain_val = "3"; /* 0.3 */
default_gain = "0";
min_hdr_ratio = "1";
max_hdr_ratio = "1";
framerate_factor = "1";
min_framerate = "1";
max_framerate = "30";
step_framerate = "1";
default_framerate = "30";
exposure_factor = "1000000";
min_exp_time = "59"; /*us, 2 lines*/
max_exp_time = "33333";
step_exp_time = "1";
default_exp_time = "33333";/* us */
embedded_metadata_height = "0";
};
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
ar0233_ar0233_out2: endpoint {
vc-id = <2>;
port-index = <0>;
bus-width = <4>;
remote-endpoint = <&ar0233_csi_in2>;
};
};
};
gmsl-link {
src-csi-port = "c";
dst-csi-port = "a";
serdes-csi-link = "a";
csi-mode = "1x4";
st-vc = <0>;
vc-id = <2>;
num-lanes = <4>;
streams = "ued-u1", "raw12";
};
};
imx390_d@1e {
compatible = "nvidia,imx390";
reg = <0x1e>;
/* Physical dimensions of sensor */
physical_w = "15.0";
physical_h = "12.5";
sensor_model ="imx390";
/* Defines number of frames to be dropped by driver internally after applying */
/* sensor crop settings. Some sensors send corrupt frames after applying */
/* crop co-ordinates */
post_crop_frame_drop = "0";
/* Convert Gain to unit of dB (decibel) befor passing to kernel driver */
use_decibel_gain = "true";
/* enable CID_SENSOR_MODE_ID for sensor modes selection */
use_sensor_mode_id = "true";
/**
* A modeX node is required to support v4l2 driver
* implementation with NVIDIA camera software stack
*
* mclk_khz = "";
* Standard MIPI driving clock, typically 24MHz
*
* num_lanes = "";
* Number of lane channels sensor is programmed to output
*
* tegra_sinterface = "";
* The base tegra serial interface lanes are connected to
*
* vc_id = "";
* The virtual channel id of the sensor.
*
* discontinuous_clk = "";
* The sensor is programmed to use a discontinuous clock on MIPI lanes
*
* dpcm_enable = "true";
* The sensor is programmed to use a DPCM modes
*
* cil_settletime = "";
* MIPI lane settle time value.
* A "0" value attempts to autocalibrate based on mclk_khz and pix_clk_hz
*
* active_w = "";
* Pixel active region width
*
* active_h = "";
* Pixel active region height
*
* dynamic_pixel_bit_depth = "";
* sensor dynamic bit depth for sensor mode
*
* csi_pixel_bit_depth = "";
* sensor output bit depth for sensor mode
*
* mode_type="";
* Sensor mode type, For eg: yuv, Rgb, bayer, bayer_wdr_pwl
*
* pixel_phase="";
* Pixel phase for sensor mode, For eg: rggb, vyuy, rgb888
*
* readout_orientation = "0";
* Based on camera module orientation.
* Only change readout_orientation if you specifically
* Program a different readout order for this mode
*
* line_length = "";
* Pixel line length (width) for sensor mode.
* This is used to calibrate features in our camera stack.
*
* pix_clk_hz = "";
* Sensor pixel clock used for calculations like exposure and framerate
*
*
*
*
* inherent_gain = "";
* Gain obtained inherently from mode (ie. pixel binning)
*
* min_gain_val = ""; (floor to 6 decimal places)
* max_gain_val = ""; (floor to 6 decimal places)
* Gain limits for mode
* if use_decibel_gain = "true", please set the gain as decibel
*
* min_exp_time = ""; (ceil to integer)
* max_exp_time = ""; (ceil to integer)
* Exposure Time limits for mode (us)
*
*
* min_hdr_ratio = "";
* max_hdr_ratio = "";
* HDR Ratio limits for mode
*
* min_framerate = "";
* max_framerate = "";
* Framerate limits for mode (fps)
*
* embedded_metadata_height = "";
* Sensor embedded metadata height in units of rows.
* If sensor does not support embedded metadata value should be 0.
*/
mode0 {/*mode IMX390_MODE_1920X1080_CROP_30FPS*/
mclk_khz = "24000";
num_lanes = "4";
tegra_sinterface = "serial_d";
vc_id = "3";
discontinuous_clk = "no";
dpcm_enable = "false";
cil_settletime = "0";
dynamic_pixel_bit_depth = "16";
csi_pixel_bit_depth = "16";
mode_type = "yuv";
pixel_phase = "uyvy";
active_w = "1920";
active_h = "1200";
readout_orientation = "0";
line_length = "1920";
inherent_gain = "1";
pix_clk_hz = "87500000";
serdes_pix_clk_hz = "350000000";
gain_factor = "10";
min_gain_val = "0"; /* dB */
max_gain_val = "300"; /* dB */
step_gain_val = "3"; /* 0.3 */
default_gain = "0";
min_hdr_ratio = "1";
max_hdr_ratio = "1";
framerate_factor = "1";
min_framerate = "1";
max_framerate = "30";
step_framerate = "1";
default_framerate = "30";
exposure_factor = "1000000";
min_exp_time = "59"; /*us, 2 lines*/
max_exp_time = "33333";
step_exp_time = "1";
default_exp_time = "33333";/* us */
embedded_metadata_height = "0";
};
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
ar0233_ar0233_out3: endpoint {
vc-id = <3>;
port-index = <0>;
bus-width = <4>;
remote-endpoint = <&ar0233_csi_in3>;
};
};
};
gmsl-link {
src-csi-port = "d";
dst-csi-port = "a";
serdes-csi-link = "a";
csi-mode = "1x4";
st-vc = <0>;
vc-id = <3>;
num-lanes = <4>;
streams = "ued-u1", "raw12";
};
};
};
};
/ {
tegra-camera-platform {
compatible = "nvidia, tegra-camera-platform";
/**
* Physical settings to calculate max ISO BW
*
* num_csi_lanes = <>;
* Total number of CSI lanes when all cameras are active
*
* max_lane_speed = <>;
* Max lane speed in Kbit/s
*
* min_bits_per_pixel = <>;
* Min bits per pixel
*
* vi_peak_byte_per_pixel = <>;
* Max byte per pixel for the VI ISO case
*
* vi_bw_margin_pct = <>;
* Vi bandwidth margin in percentage
*
* max_pixel_rate = <>;
* Max pixel rate in Kpixel/s for the ISP ISO case
*
* isp_peak_byte_per_pixel = <>;
* Max byte per pixel for the ISP ISO case
*
* isp_bw_margin_pct = <>;
* Isp bandwidth margin in percentage
*/
num_csi_lanes = <4>;
max_lane_speed = <4000000>;
min_bits_per_pixel = <10>;
vi_peak_byte_per_pixel = <2>;
vi_bw_margin_pct = <25>;
isp_peak_byte_per_pixel = <5>;
isp_bw_margin_pct = <25>;
/**
* The general guideline for naming badge_info contains 3 parts, and is as follows,
* The first part is the camera_board_id for the module; if the module is in a FFD
* platform, then use the platform name for this part.
* The second part contains the position of the module, ex. "rear" or "front".
* The third part contains the last 6 characters of a part number which is found
* in the module's specsheet from the vender.
*/
modules {
module0 {
badge = "imx390_rear";
position = "rear";
orientation = "1";
drivernode0 {
/* Declare PCL support driver (classically known as guid) */
pcl_id = "v4l2_sensor";
/* Driver v4l2 device name */
devname = "imx390 30-001b";
/* Declare the device-tree hierarchy to driver instance */
proc-device-tree = "/proc/device-tree/i2c@3180000/imx390_a@1b";
};
};
module1 {
badge = "imx390_front";
position = "front";
orientation = "1";
drivernode0 {
/* Declare PCL support driver (classically known as guid) */
pcl_id = "v4l2_sensor";
/* Driver v4l2 device name */
devname = "imx390 30-001c";
/* Declare the device-tree hierarchy to driver instance */
proc-device-tree = "/proc/device-tree/i2c@3180000/imx390_b@1c";
};
};
module2 {
badge = "imx390_left";
position = "left";
orientation = "1";
drivernode0 {
/* Declare PCL support driver (classically known as guid) */
pcl_id = "v4l2_sensor";
/* Driver v4l2 device name */
devname = "imx390 30-001d";
/* Declare the device-tree hierarchy to driver instance */
proc-device-tree = "/proc/device-tree/i2c@3180000/imx390_c@1d";
};
};
module3 {
badge = "imx390_right";
position = "right";
orientation = "1";
drivernode0 {
/* Declare PCL support driver (classically known as guid) */
pcl_id = "v4l2_sensor";
/* Driver v4l2 device name */
devname = "imx390 30-001e";
/* Declare the device-tree hierarchy to driver instance */
proc-device-tree = "/proc/device-tree/i2c@3180000/imx390_d@1e";
};
};
};
};
};