Hi,
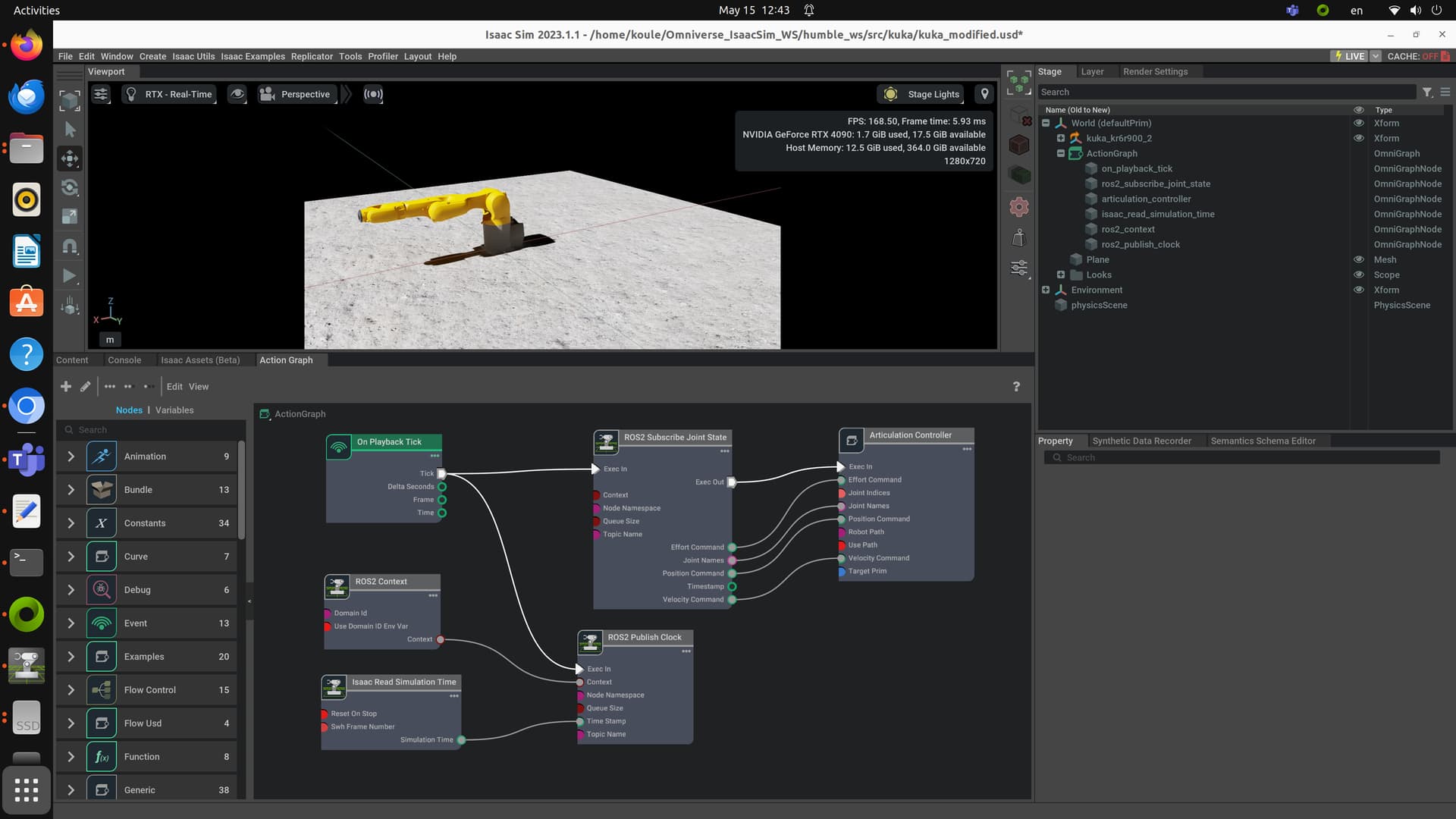
I have made a node in ROS2 Humble that publishes the joint states of my robot. Then I imported the URDF definition of the robot into Isaac Sim 2023.1.1 stage. The URDF file doesn’t include the moment of inertia for the parts of the robot which is OK for now because I don’t need physics. The limits for the joints in the URDF are in following format: limit effort=“0” lower=“-3.2288591161895095” upper=“3.2288591161895095” velocity=“7.853981633974483”. The action graph is in the attached picture:
You can also see the difference of the movement in Rviz and Issac Sim. Check out following videos:
Why is the robot shivering in Isaac Sim. Do I have to play with the stiffness values for the joints? Shall I turn off physics for the simulation before I hit the play button? How can I do that?