Im running ISAAC-ROS Visual SLAM on a Jetson AGX Orin and would like to use its odometry output on a separate PC, which is running ROS2 Humble inside a Docker container.I’ve attempted to enable communication between the two systems by,
Setting the same ROS_DOMAIN_ID on both devices
Using also CycloneDDS as RMW Implementation
However, communication between them is not working. ros2 topic list in PC docker container does not list any topics from the Jetson.
Please suggest a recommended approach for enabling this communication.
While I try this troubleshooting step, I have another follow up question.
How to setup communication between isaac-ros-dev-container with another ROS2 container running in the same jetson device? Do you have detailed steps documented anywhere?
I am asking because, the setup for isaac-ros-dev-container appears complex compared to a standalone ros2 humble container.
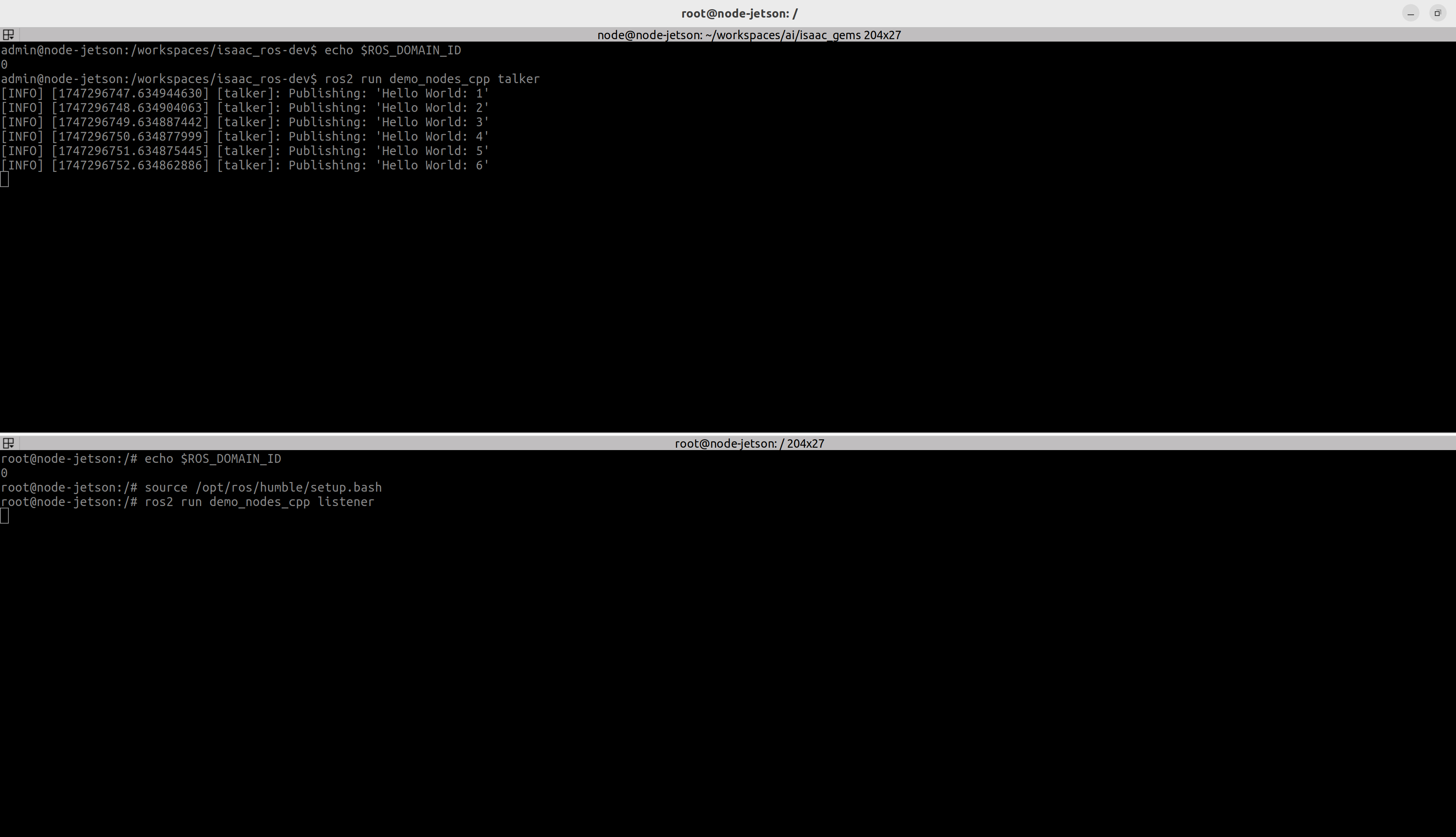
Since the containers in the device share the host network, you just need to ensure that ROS_DOMAIN_ID is the same. You can run ros2 demo_nodes_cpp below in each container to test.
I tried what you suggested but I am not able to access the data in the topic. In the screenshot, the top terminal is the isaac-ros-dev container and the bottom container is a ros:humble container pulled open-source. The ros:humble container was launched with network=host like docker run --network=host -it ros:humble bash.