Hi, I’ve recently encountered an issue with the Nvblox Static Reconstruction within Isaac Sim. Up until a few days ago, everything was working perfectly, and the mesh displayed as expected. However, now, even when following the quickstart guide, the Nvblox Mesh fails to display.
Quickstart Documentation I followed:
I would greatly appreciate it if someone could take another look at the repository to identify what might be causing this sudden issue.
For context, here’s a breakdown of the problem encountered during the build and source steps of the workspace, as well as the errors received when attempting to run tests to verify the
(I am the user who wrote the post below)
link:
Step6: Build and source the workspace:
admin@kim415-mobilityservice2:/workspaces/isaac_ros-dev$ cd /workspaces/isaac_ros-dev && \
colcon build --symlink-install &&
source install/setup.bash
Error:
Finished <<< nvblox_isaac_sim [2.49s]
Finished <<< nvblox_cpu_gpu_tools [2.63s]
Finished <<< nvblox [2.82s]
— stderr: isaac_ros_benchmark
In file included from /workspaces/isaac_ros-dev/src/isaac_ros_benchmark/isaac_ros_benchmark/src/> > nitros_playback_node.cpp:18:
/workspaces/isaac_ros-dev/src/isaac_ros_benchmark/isaac_ros_benchmark/include/isaac_ros_benchmark/ > nitros_playback_node.hpp:31:10: fatal error: ros2_benchmark/playback_node.hpp: No such file or directory
31 | include “ros2_benchmark/playback_node.hpp”
| ^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
compilation terminated.
make[2]: *** [CMakeFiles/nitros_playback_node.dir/build.make:76: CMakeFiles/nitros_playback_node.dir/src/ > nitros_playback_node.cpp.o] Error 1
make[1]: *** [CMakeFiles/Makefile2:194: CMakeFiles/nitros_playback_node.dir/all] Error 2
make[1]: *** Waiting for unfinished jobs…
make: *** [Makefile:146: all] Error 2Failed <<< isaac_ros_benchmark [1.24s, exited with code 2]
Aborted <<< nvblox_image_padding [1.07s]
Aborted <<< isaac_ros_triton [0.50s]
Aborted <<< isaac_ros_h264_encoder [0.38s]
Aborted <<< isaac_ros_ess [0.44s]
Aborted <<< isaac_ros_bi3d_freespace [0.47s]
Aborted <<< isaac_ros_h264_decoder [0.42s]
Aborted <<< isaac_ros_dnn_image_encoder [0.60s]
Aborted <<< nvblox_performance_measurement_msgs [2.92s]
Aborted <<< isaac_ros_tensor_rt [0.57s]
Aborted <<< isaac_ros_bi3d_interfaces [1.38s]
Aborted <<< isaac_ros_nitros_bridge_interfaces [1.33s]
Aborted <<< isaac_ros_pointcloud_interfaces [1.31s]
Aborted <<< isaac_ros_nova_interfaces [1.35s]
Aborted <<< isaac_ros_apriltag_interfaces [1.47s]
Aborted <<< nvblox_msgs [3.23s]
Aborted <<< isaac_ros_tensor_list_interfaces [1.40s]Summary: 10 packages finished [4.45s]
1 package failed: isaac_ros_benchmark
16 packages aborted: isaac_ros_apriltag_interfaces isaac_ros_bi3d_freespace isaac_ros_bi3d_interfaces > isaac_ros_dnn_image_encoder isaac_ros_ess isaac_ros_h264_decoder isaac_ros_h264_encoder > isaac_ros_nitros_bridge_interfaces isaac_ros_nova_interfaces isaac_ros_pointcloud_interfaces > isaac_ros_tensor_list_interfaces isaac_ros_tensor_rt isaac_ros_triton nvblox_image_padding nvblox_msgs > nvblox_performance_measurement_msgs
1 package had stderr output: isaac_ros_benchmark
10 packages not processed
Step7: (Optional) Run tests to verify complete and correct installation:
colcon test --executor sequential
Error:
Starting >>> isaac_ros_common
Finished <<< isaac_ros_common [1.39s]
Starting >>> isaac_ros_test
Finished <<< isaac_ros_test [16.8s]
Starting >>> isaac_ros_to_h264_msgs_packet
Finished <<< isaac_ros_to_h264_msgs_packet [0.39s]
Starting >>> network_performance_measurement
Finished <<< network_performance_measurement [0.03s]
Starting >>> nvblox
Finished <<< nvblox [49.7s]
Starting >>> nvblox_cpu_gpu_tools
Finished <<< nvblox_cpu_gpu_tools [0.65s]
Starting >>> nvblox_examples_bringup
Finished <<< nvblox_examples_bringup [0.03s]
Starting >>> nvblox_isaac_sim
Finished <<< nvblox_isaac_sim [0.69s]
Starting >>> nvblox_msgs
Finished <<< nvblox_msgs [0.03s]
Starting >>> nvblox_performance_measurement_msgs
Finished <<< nvblox_performance_measurement_msgs [0.03s]
Starting >>> nvblox_ros_common
Finished <<< nvblox_ros_common [0.03s]
Starting >>> odometry_flattener
Finished <<< odometry_flattener [0.03s]
Starting >>> isaac_ros_apriltag_interfaces
Finished <<< isaac_ros_apriltag_interfaces [0.89s]
Starting >>> isaac_ros_benchmark
— stderr: isaac_ros_benchmark
Errors while running CTest
Output from these tests are in: /workspaces/isaac_ros-dev/build/isaac_ros_benchmark/Testing/Temporary/ > LastTest.log
Use “–rerun-failed --output-on-failure” to re-run the failed cases verbosely.Finished <<< isaac_ros_benchmark [2.01s] [ with test failures ]
Starting >>> isaac_ros_bi3d_freespace
Finished <<< isaac_ros_bi3d_freespace [8.31s]
Starting >>> isaac_ros_bi3d_interfaces
Finished <<< isaac_ros_bi3d_interfaces [0.92s]
Starting >>> isaac_ros_dnn_image_encoder
[83.434s] ERROR:colcon.colcon_cmake.task.cmake.test:Failed to find the following files:
- /workspaces/isaac_ros-dev/install/isaac_ros_dnn_image_encoder/share/isaac_ros_dnn_image_encoder/ > package.sh
Check that the following packages have been built:- isaac_ros_dnn_image_encoder
Failed <<< isaac_ros_dnn_image_encoder [0.02s, exited with code 1]
Starting >>> isaac_ros_ess
[83.449s] ERROR:colcon.colcon_cmake.task.cmake.test:Failed to find the following files:- /workspaces/isaac_ros-dev/install/isaac_ros_ess/share/isaac_ros_ess/package.sh
Check that the following packages have been built:- isaac_ros_ess
Failed <<< isaac_ros_ess [0.01s, exited with code 1]
Starting >>> isaac_ros_h264_decoder
Finished <<< isaac_ros_h264_decoder [7.19s]
Starting >>> isaac_ros_h264_encoder
Finished <<< isaac_ros_h264_encoder [6.29s]
Starting >>> isaac_ros_nitros_bridge_interfaces
Finished <<< isaac_ros_nitros_bridge_interfaces [0.90s]
Starting >>> isaac_ros_nova_interfaces
Finished <<< isaac_ros_nova_interfaces [0.90s]
Starting >>> isaac_ros_pointcloud_interfaces
Finished <<< isaac_ros_pointcloud_interfaces [0.70s]
Starting >>> isaac_ros_tensor_list_interfaces
Finished <<< isaac_ros_tensor_list_interfaces [0.92s]
Starting >>> isaac_ros_tensor_rt
[100.373s] ERROR:colcon.colcon_cmake.task.cmake.test:Failed to find the following files:- /workspaces/isaac_ros-dev/install/isaac_ros_tensor_rt/share/isaac_ros_tensor_rt/package.sh
Check that the following packages have been built:- isaac_ros_tensor_rt
Failed <<< isaac_ros_tensor_rt [0.03s, exited with code 1]
Starting >>> isaac_ros_triton
[100.388s] ERROR:colcon.colcon_cmake.task.cmake.test:Failed to find the following files:- /workspaces/isaac_ros-dev/install/isaac_ros_triton/share/isaac_ros_triton/package.sh
Check that the following packages have been built:- isaac_ros_triton
Failed <<< isaac_ros_triton [0.01s, exited with code 1]
Starting >>> nvblox_image_padding
Finished <<< nvblox_image_padding [0.03s]
Starting >>> nvblox_nav2
Finished <<< nvblox_nav2 [1.54s]
Starting >>> nvblox_ros
— stderr: nvblox_ros
Errors while running CTest
Output from these tests are in: /workspaces/isaac_ros-dev/build/nvblox_ros/Testing/Temporary/LastTest.log
Use “–rerun-failed --output-on-failure” to re-run the failed cases verbosely.
Finished <<< nvblox_ros [3.70s] [ with test failures ]
Starting >>> nvblox_rviz_plugin
Finished <<< nvblox_rviz_plugin [0.04s]
Starting >>> semantic_label_conversion
Finished <<< semantic_label_conversion [0.03s]
Starting >>> isaac_ros_apriltag
Finished <<< isaac_ros_apriltag [6.72s]
Starting >>> isaac_ros_nitros_bi3d_inference_param_array_type
Finished <<< isaac_ros_nitros_bi3d_inference_param_array_type [8.16s]
Starting >>> isaac_ros_nvblox
Finished <<< isaac_ros_nvblox [0.92s]
Starting >>> isaac_ros_unet
[121.553s] ERROR:colcon.colcon_cmake.task.cmake.test:Failed to find the following files:
- /workspaces/isaac_ros-dev/install/isaac_ros_dnn_image_encoder/share/isaac_ros_dnn_image_encoder/ > package.sh
- /workspaces/isaac_ros-dev/install/isaac_ros_tensor_rt/share/isaac_ros_tensor_rt/package.sh
- /workspaces/isaac_ros-dev/install/isaac_ros_triton/share/isaac_ros_triton/package.sh
- /workspaces/isaac_ros-dev/install/isaac_ros_unet/share/isaac_ros_unet/package.sh
Check that the following packages have been built:- isaac_ros_dnn_image_encoder
- isaac_ros_tensor_rt
- isaac_ros_triton
- isaac_ros_unet
Failed <<< isaac_ros_unet [0.02s, exited with code 1]
Starting >>> nvblox_performance_measurement
Finished <<< nvblox_performance_measurement [0.04s]
Starting >>> isaac_ros_bi3d
— stderr: isaac_ros_bi3d
Errors while running CTest
Output from these tests are in: /workspaces/isaac_ros-dev/build/isaac_ros_bi3d/Testing/Temporary/LastTest.log
Use “–rerun-failed --output-on-failure” to re-run the failed cases verbosely.
Finished <<< isaac_ros_bi3d [25.5s] [ with test failures ]
Summary: 32 packages finished [2min 27s]
5 packages failed: isaac_ros_dnn_image_encoder isaac_ros_ess isaac_ros_tensor_rt isaac_ros_triton > isaac_ros_unet
3 packages had stderr output: isaac_ros_benchmark isaac_ros_bi3d nvblox_ros
3 packages had test failures: isaac_ros_benchmark isaac_ros_bi3d nvblox_ros
Step8: In a current terminal inside the Docker container, run the launch file for Nvblox with nav2:
source /workspaces/isaac_ros-dev/install/setup.bash &&
ros2 launch nvblox_examples_bringup isaac_sim_example.launch.py
Error:
[INFO] [launch]: All log files can be found below /home/admin/.ros/log/2024-02-05-16-53-57-689811-kim415- > mobilityservice2-79234
[INFO] [launch]: Default logging verbosity is set to INFO
[ERROR] [launch_ros.actions.load_composable_nodes]: Failed to load node ‘nvblox_node’ of type > ‘nvblox::NvbloxNode’ in container ‘shared_nvblox_container’: Could not find requested resource in ament index
[INFO] [component_container_mt-1]: process started with pid [79245]
[INFO] [controller_server-2]: process started with pid [79247]
[INFO] [smoother_server-3]: process started with pid [79249]
[INFO] [planner_server-4]: process started with pid [79251]
[INFO] [behavior_server-5]: process started with pid [79253]
[INFO] [bt_navigator-6]: process started with pid [79255]
[INFO] [waypoint_follower-7]: process started with pid [79257]
[INFO] [velocity_smoother-8]: process started with pid [79259]
[INFO] [lifecycle_manager-9]: process started with pid [79261]
[INFO] [rviz2-10]: process started with pid [79263]
[velocity_smoother-8] [INFO] [1707119638.506115723] [velocity_smoother]:
[velocity_smoother-8] velocity_smoother lifecycle node launched.
[velocity_smoother-8] Waiting on external lifecycle transitions to activate
[velocity_smoother-8] See Managed nodes for more information.
[bt_navigator-6] [INFO] [1707119638.565522792] [bt_navigator]:
[bt_navigator-6] bt_navigator lifecycle node launched.
[bt_navigator-6] Waiting on external lifecycle transitions to activate
[bt_navigator-6] See Managed nodes for more information.
[bt_navigator-6] [INFO] [1707119638.566939733] [bt_navigator]: Creating
[waypoint_follower-7] [INFO] [1707119638.596527479] [waypoint_follower]:
[waypoint_follower-7] waypoint_follower lifecycle node launched.
[waypoint_follower-7] Waiting on external lifecycle transitions to activate
[waypoint_follower-7] See Managed nodes for more information.
[waypoint_follower-7] [INFO] [1707119638.600000736] [waypoint_follower]: Creating
[controller_server-2] [INFO] [1707119638.636746785] [controller_server]:
[controller_server-2] controller_server lifecycle node launched.
[controller_server-2] Waiting on external lifecycle transitions to activate
[controller_server-2] See Managed nodes for more information.
[lifecycle_manager-9] [INFO] [1707119638.659521553] [lifecycle_manager_navigation]: Creating
[behavior_server-5] [INFO] [1707119638.664495995] [behavior_server]:
[behavior_server-5] behavior_server lifecycle node launched.
[behavior_server-5] Waiting on external lifecycle transitions to activate
[behavior_server-5] See Managed nodes for more information.
[controller_server-2] [INFO] [1707119638.675261811] [controller_server]: Creating controller server
[lifecycle_manager-9] [INFO] [1707119638.678654206] [lifecycle_manager_navigation]: Creating and initializing > lifecycle service clients
[smoother_server-3] [INFO] [1707119638.686721158] [smoother_server]:
[smoother_server-3] smoother_server lifecycle node launched.
[smoother_server-3] Waiting on external lifecycle transitions to activate
[smoother_server-3] See Managed nodes for more information.
[smoother_server-3] [INFO] [1707119638.704164844] [smoother_server]: Creating smoother server
[rviz2-10] QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to ‘/tmp/runtime-admin’
[controller_server-2] [INFO] [1707119638.864416652] [local_costmap.local_costmap]:
[controller_server-2] local_costmap lifecycle node launched.
[controller_server-2] Waiting on external lifecycle transitions to activate
[controller_server-2] See Managed nodes for more information.
[controller_server-2] [INFO] [1707119638.866224101] [local_costmap.local_costmap]: Creating Costmap
[rviz2-10] [INFO] [1707119639.169335916] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-10] [INFO] [1707119639.170384984] [rviz2]: OpenGl version: 4.6 (GLSL 4.6)
[rviz2-10] [INFO] [1707119639.189924529] [rviz2]: Stereo is NOT SUPPORTED
[planner_server-4] [INFO] [1707119639.192522529] [planner_server]:
[planner_server-4] planner_server lifecycle node launched.
[planner_server-4] Waiting on external lifecycle transitions to activate
[planner_server-4] See Managed nodes for more information.
[planner_server-4] [INFO] [1707119639.195046338] [planner_server]: Creating
[rviz2-10] [ERROR] [1707119639.401073675] [rviz2]: PluginlibFactory: The plugin for class ‘nvblox_rviz_plugin/ > NvbloxMesh’ failed to load. Error: According to the loaded plugin descriptions the class nvblox_rviz_plugin/ > NvbloxMesh with base class type rviz_common::Display does not exist. Declared types are nav2_rviz_plugins/ > ParticleCloud rviz_default_plugins/AccelStamped rviz_default_plugins/Axes rviz_default_plugins/Camera > rviz_default_plugins/DepthCloud rviz_default_plugins/Effort rviz_default_plugins/FluidPressure > rviz_default_plugins/Grid rviz_default_plugins/GridCells rviz_default_plugins/Illuminance rviz_default_plugins/ > Image rviz_default_plugins/InteractiveMarkers rviz_default_plugins/LaserScan rviz_default_plugins/Map > rviz_default_plugins/Marker rviz_default_plugins/MarkerArray rviz_default_plugins/Odometry > rviz_default_plugins/Path rviz_default_plugins/PointCloud rviz_default_plugins/PointCloud2 rviz_default_plugins/ > PointStamped rviz_default_plugins/Polygon rviz_default_plugins/Pose rviz_default_plugins/PoseArray > rviz_default_plugins/PoseWithCovariance rviz_default_plugins/Range rviz_default_plugins/RelativeHumidity > rviz_default_plugins/ > RobotModel rviz_default_plugins/TF rviz_default_plugins/Temperature rviz_default_plugins/TwistStamped > rviz_default_plugins/Wrench
[rviz2-10] [INFO] [1707119639.666871688] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-10] [INFO] [1707119639.683478800] [rviz2]: Stereo is NOT SUPPORTED
[planner_server-4] [INFO] [1707119639.722840467] [global_costmap.global_costmap]:
[planner_server-4] global_costmap lifecycle node launched.
[planner_server-4] Waiting on external lifecycle transitions to activate
[planner_server-4] See Managed nodes for more information.
[planner_server-4] [INFO] [1707119639.723828691] [global_costmap.global_costmap]: Creating Costmap
[lifecycle_manager-9] [INFO] [1707119640.533850064] [lifecycle_manager_navigation]: Starting managed nodes bringup…
[lifecycle_manager-9] [INFO] [1707119640.533893399] [lifecycle_manager_navigation]: Configuring controller_server
[controller_server-2] [INFO] [1707119640.534178318] [controller_server]: Configuring controller interface
[lifecycle_manager-9] [INFO] [1707119640.534433633] [lifecycle_manager_navigation]: Configuring smoother_server
[smoother_server-3] [INFO] [1707119640.534744379] [smoother_server]: Configuring smoother server
[lifecycle_manager-9] [ERROR] [1707119640.535203484] [lifecycle_manager_navigation]: Failed to change state > for node: smoother_server
[lifecycle_manager-9] [ERROR] [1707119640.535228296] [lifecycle_manager_navigation]: Failed to bring up all > requested nodes. Aborting bringup.
[controller_server-2] [INFO] [1707119640.535319899] [controller_server]: getting goal checker plugins..
[controller_server-2] [INFO] [1707119640.536248699] [controller_server]: Controller frequency set to 10.0000Hz
[controller_server-2] [INFO] [1707119640.536305093] [local_costmap.local_costmap]: Configuring
[controller_server-2] [INFO] [1707119640.543953345] [local_costmap.local_costmap]: Using plugin > “nvblox_base_layer”
[controller_server-2] [INFO] [1707119640.547134248] [local_costmap.local_costmap]: Name: nvblox_base_layer > Topic name: /nvblox_node/static_map_slice Max obstacle distance: 1
[smoother_server-3] [INFO] [1707119640.547580388] [smoother_server]: Created smoother : simple_smoother > of type nav2_smoother::SimpleSmoother
[controller_server-2] [INFO] [1707119640.549494103] [local_costmap.local_costmap]: Initialized plugin > “nvblox_base_layer”
[controller_server-2] [INFO] [1707119640.549538187] [local_costmap.local_costmap]: Using plugin > “nvblox_human_layer”
[smoother_server-3] [INFO] [1707119640.550503687] [smoother_server]: Smoother Server has simple_smoother > smoothers available.
[controller_server-2] [INFO] [1707119640.551293484] [local_costmap.local_costmap]: Name: > nvblox_human_layer Topic name: /nvblox_human_node/dynamic_map_slice Max obstacle distance: 1
[controller_server-2] [INFO] [1707119640.552604099] [local_costmap.local_costmap]: Initialized plugin > “nvblox_human_layer”
[controller_server-2] [INFO] [1707119640.564756242] [controller_server]: Created progress_checker : > progress_checker of type nav2_controller::SimpleProgressChecker
[controller_server-2] [INFO] [1707119640.565731423] [controller_server]: Created goal checker : goal_checker of > type nav2_controller::SimpleGoalChecker
[controller_server-2] [INFO] [1707119640.566466713] [controller_server]: Controller Server has goal_checker > goal checkers available.
[controller_server-2] [INFO] [1707119640.567963561] [controller_server]: Created controller : FollowPath of type > dwb_core::DWBLocalPlanner
[controller_server-2] [INFO] [1707119640.570267402] [controller_server]: Setting transform_tolerance to > 0.200000
[controller_server-2] [INFO] [1707119640.583746885] [controller_server]: Using critic “RotateToGoal” > (dwb_critics::RotateToGoalCritic)
[controller_server-2] [INFO] [1707119640.584794289] [controller_server]: Critic plugin initialized
[controller_server-2] [INFO] [1707119640.585043323] [controller_server]: Using critic “Oscillation” > (dwb_critics::OscillationCritic)
[controller_server-2] [INFO] [1707119640.586094535] [controller_server]: Critic plugin initialized
[controller_server-2] [INFO] [1707119640.586321270] [controller_server]: Using critic “BaseObstacle” > (dwb_critics::BaseObstacleCritic)
[controller_server-2] [INFO] [1707119640.586751120] [controller_server]: Critic plugin initialized
[controller_server-2] [INFO] [1707119640.587053347] [controller_server]: Using critic “GoalAlign” > (dwb_critics::GoalAlignCritic)
[controller_server-2] [INFO] [1707119640.587777237] [controller_server]: Critic plugin initialized
[controller_server-2] [INFO] [1707119640.588028589] [controller_server]: Using critic “PathAlign” > (dwb_critics::PathAlignCritic)
[controller_server-2] [INFO] [1707119640.588856503] [controller_server]: Critic plugin initialized
[controller_server-2] [INFO] [1707119640.589054890] [controller_server]: Using critic “PathDist” > (dwb_critics::PathDistCritic)
[controller_server-2] [INFO] [1707119640.589730499] [controller_server]: Critic plugin initialized
[controller_server-2] [INFO] [1707119640.590002392] [controller_server]: Using critic “GoalDist” > (dwb_critics::GoalDistCritic)
[controller_server-2] [INFO] [1707119640.590700676] [controller_server]: Critic plugin initialized
[controller_server-2] [INFO] [1707119640.590734472] [controller_server]: Controller Server has FollowPath > controllers available.
Displayed Rviz:
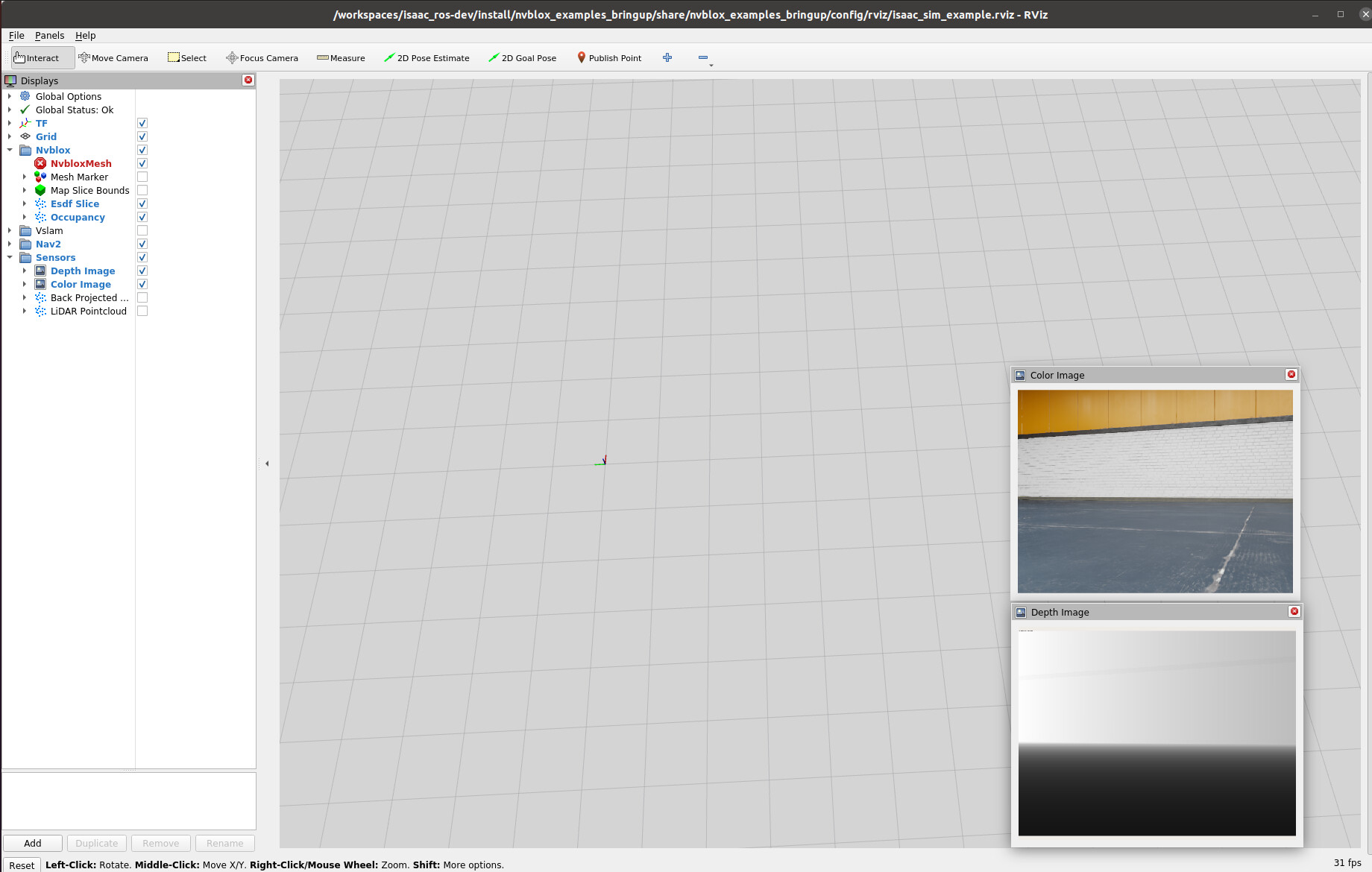
This situation is puzzling as the setup previously functioned without any problems. It’s unclear whether this issue arises from recent updates to the Nvblox or Isaac Sim environments, or perhaps due to changes in the ROS 2 setup.