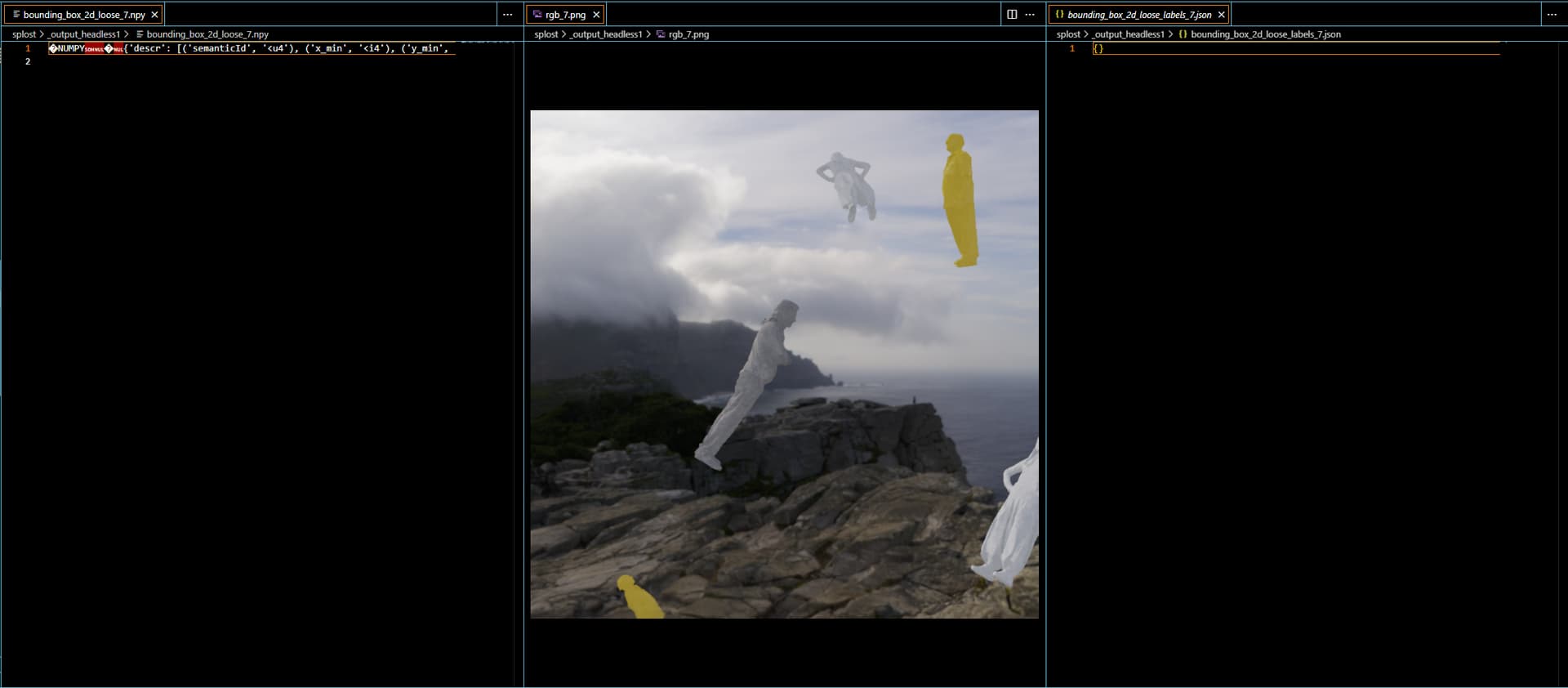
I’m trying to generate randomized visual and bounding box data. The usd files that I’m loading in have semantic labels, and when viewing the bounding boxes through the websocket gui, they are visible. However, when generating data and using the BasicWriter, the .json files for the bounding boxes are empty, even with multiple labeled objects visible in the rgb output.

UPDATE: This problem was fixed by changing this code
1 #this function chooses the random objects to be instantiated in the frame and modifies their position, material, and rotation
2 def get_random_object(size):
3 usd_files = glob.glob("/path/to/**/*.usd")
4 print(usd_files)
5 get_objects = rep.randomizer.instantiate(usd_files, size=size, mode='point_instance')
6 with get_objects:
7 rep.randomizer.materials(mat_list)
8 rep.modify.pose(
9 position=rep.distribution.uniform((-40, -40, 0), (40, 40, 80)),
10 rotation=rep.distribution.uniform((-90, -180, 0), (90, 180, 0))
11 )
12 return get_objects.node
13 rep.randomizer.register(get_random_object)
14
15 #call the randomization functions and make the frames
16 with rep.trigger.on_frame(num_frames=CONFIG["num_frames"]):
17 #calling random object function to get desired objects
18 rep.randomizer.get_random_object(10)
19 #randomizing background and lighting by calling dome light function
20 rep.randomizer.dome_lights()
to this
1#this function chooses the random objects to be instantiated in the frame and modifies their position, material, and rotation
2 def get_random_object(size):
3 usd_files = glob.glob("/path/to/**/*.usd")
4 random_objects = random.sample(usd_files, size)
5 print(random_objects)
6 objects_list = []
7 for each in random_objects:
8 objects_list.append(rep.create.from_usd(each))
9 print(objects_list)
11
13 get_objects = rep.randomizer.instantiate(objects_list, size=size, mode='point_instance')
14 with rep.create.group(objects_list):
15 rep.randomizer.materials(mat_list)
16 rep.modify.pose(
17 position=rep.distribution.uniform((-20, -20, 0), (20, 20, 40)),
18 rotation=rep.distribution.uniform((-90, -180, 0), (90, 180, 0))
19 )
20 return get_objects.node
21 rep.randomizer.register(get_random_object)
22
23 #call the randomization functions and make the frames
24 with rep.trigger.on_frame(num_frames=CONFIG["num_frames"]):
25 #calling random object function to get desired objects
26 rep.randomizer.get_random_object(3)
27 #randomizing background and lighting by calling dome light function
28 rep.randomizer.dome_lights()
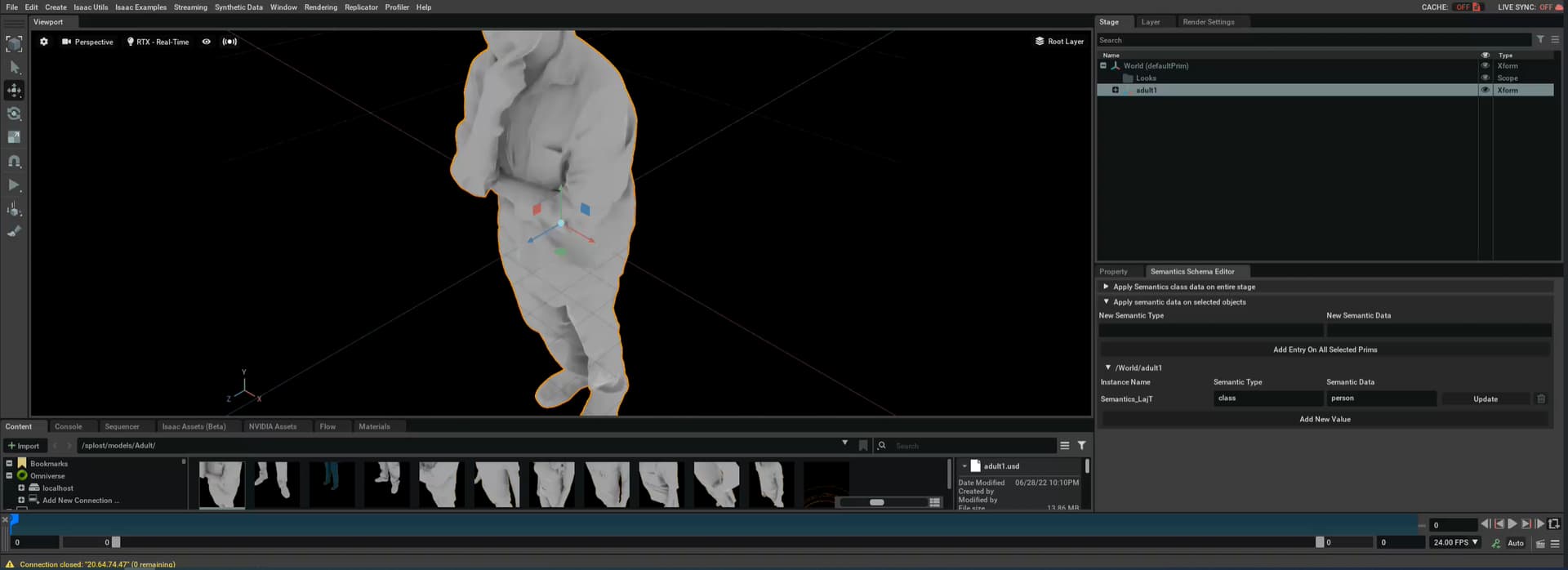
It was necessary to run the rep.create.from_usd function in order to bring in the semantic information.
However, this has led to a new problem where it is not resampling the usd files on every frame. It will pick size usd files from the path, and just use those in every frame rather randomly repicking new ones, which is the desired behavior.
Is there a way to choose new .usd files every frame and bring them in with semantic information?
Hello, sorry for the delay. I am checking with a workaround to this. Will get back to you soon.
Hello, there are two different ways to achieve what you are looking for, but each have their own trade-offs.
Instantiate is the easiest, but won’t allow you to modify the chosen objects beyond their pose and their semantics will all be the same
with rep.new_layer():
with rep.trigger.on_frame(num_frames=NUM_FRAMES):
with rep.randomizer.instantiate(
rep.utils.get_usd_files(PATH_TO_CONTENT_DIR, recursive=True, path_filter="SM_"), # path_filter is a regex to match file names
size=NUM_OBJECTS,
mode="scene_instance", # or 'point_instance'
with_replacements=False,):
rep.modify.pose(position=rep.distribution.uniform((-200,0,-200),(200,0,200)))
rep.modify.semantics([("class", "test")])