the two-wheel differential robot move in the Simple_Warehouse,and pulish odom msg by the ROS_DifferentialBase , the floors’ transforms are 0 in z axis of world coordinate . But the robot moves along the positive x-axis of world coordinate the odom-msg.position.position.z keep getting bigger , in the opposite robot moves along the negative x-axis of world coordinate the odom-msg.position.position.z keep getting smaller , it ranges exceedly from -1m to 1m , it is really radiculous . I don’t know what caused this problem , may it is my incorrect usage of Ros_DifferentialBase makes it , really Thanks if you can help me !!!
by the way , Ros_DifferentialBase’s odom seems like coming from a simulated differential base and tries to estimate the pose of the robot, is it right ? so how can I get the ground truth position of robot or other xforms in the world ?
here is the video of the trial :
here is the config of RosDifferentialBase:

Here are the robots’s odom on different positions in z axis of world coordinate :

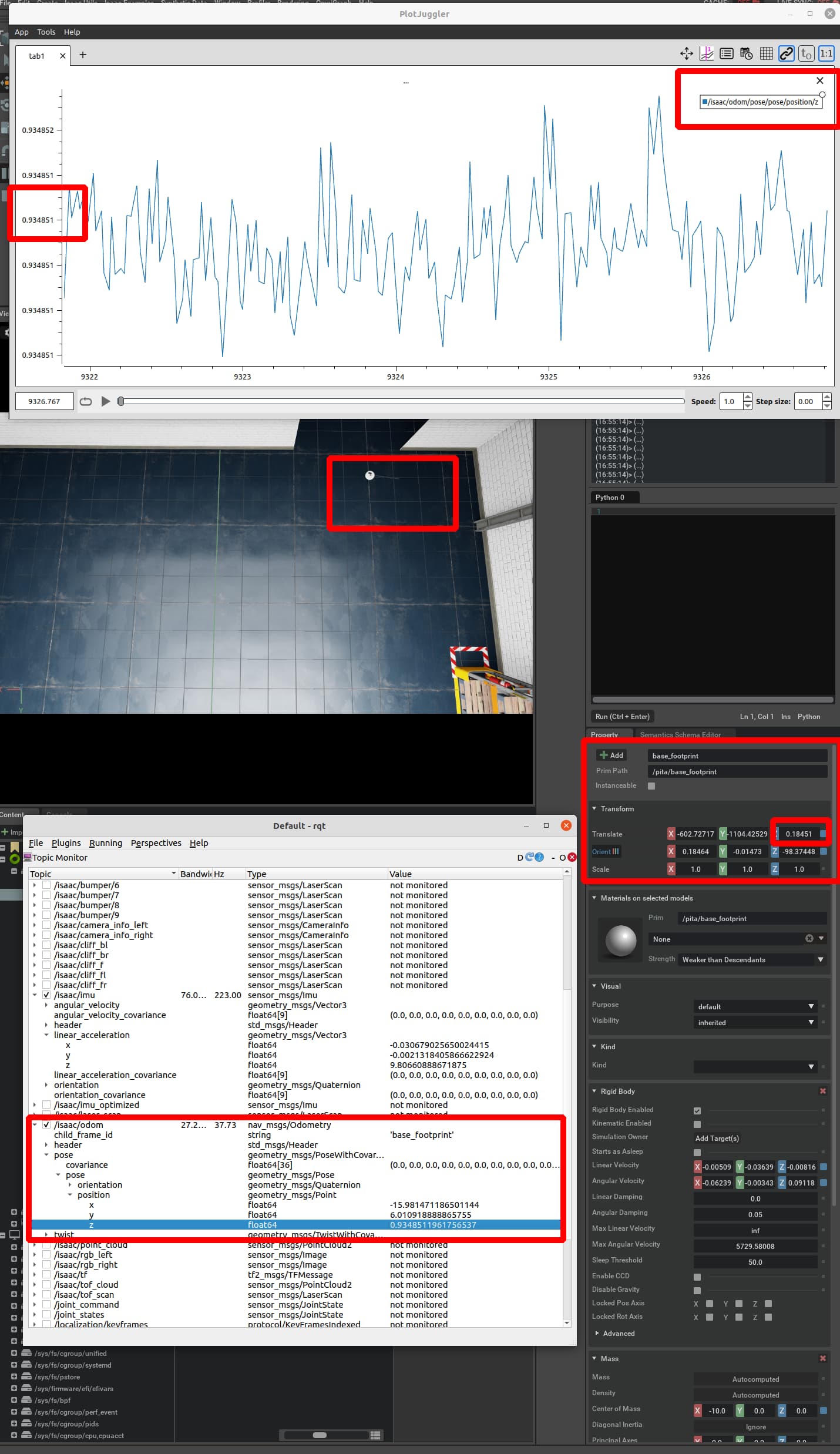
as you can see the odom’s position-z range from -0.7m to 0.9 m, at the same time the translate-z of base_footprint stabilise around 0.2 cm .