Isaac Sim Version
5.1.0
Operating System
Ubuntu 22.04
GPU Information
- Model: 5070ti
- Driver Version: 570
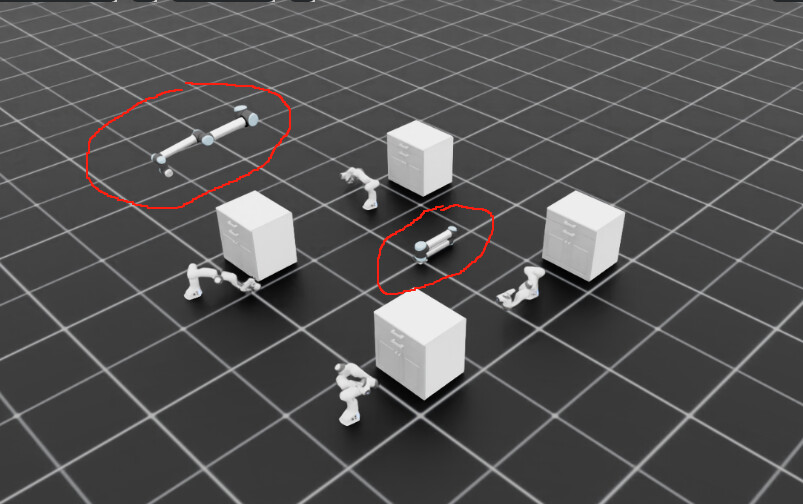
Use Isaaclab to build RL enviroment, I find the robot imported by urdf file cannot be cloned as panda_instanceable.usd or other instanceable usd file.
I use urdf importer to import my URDF robot to USD, and the robot cannot be clone as panda_instanceable.usd in RL env. I find only instanceable usd model is valid.But i dont know how to trans URDF to instanceable USD. And when i use {ISAAC_NUCLEUS_DIR}/Robots/UniversalRobots/ur10/ur10.usd, it also cannot be cloned.
Steps to Reproduce
(Add more steps as needed)
Error Messages
(If applicable, copy and paste any error messages you received)
Screenshots or Videos
(If applicable, add screenshots or links to videos that demonstrate the issue)
Additional Information
What I’ve Tried
I use the isaacLab/Source/isaaclab_tasks/direct/franka_cabinet/franka_cabinet_env.py to test, i add another ur10 ({ISAAC_NUCLEUS_DIR}/Robots/UniversalRobots/ur10/ur10.usd), and failed as my own robot!

Related Issues
(If you’re aware of any related issues or forum posts, please link them here)
Additional Context
(Add any other context about the problem here)