Voice-Controlled Autonomous Navigation Using LLaMA and Isaac Sim: Integrating Natural Language Understanding with Jetson AGX Orin

In this blog, we explore the integration of NVIDIA Isaac Sim with LLaMA for natural language-based navigation in simulated environments. By combining the power of LLaMA, a state-of-the-art language model, and Isaac Sim’s robust simulation capabilities, we create a system where a robot can interpret voice commands to autonomously navigate to specific waypoints. Using Jetson AGX Orin as the AI interface, the robot interacts in real-time with commands like “move to the pallet area” or “navigate to the charging station.” This system brings together cutting-edge AI models with autonomous robot control, enabling enhanced human-robot interaction in real-world scenarios.
This blog covers the implementation details of the project, including how LLaMA processes natural language, the use of waypoint navigation in Isaac Sim for simulation, and the integration with Jetson AGX Orin for seamless execution. This system can be used in industrial automation, warehouse management, or any application requiring hands-free control of autonomous robots.
Use Case: Natural Language-Based Waypoint Navigation for Autonomous Robots
The integration of natural language processing with autonomous navigation systems presents a transformative approach to human-robot interaction. In this use case, we demonstrate how the LLaMA language model, coupled with NVIDIA Isaac Sim, enables a robot to interpret and execute commands related to waypoint navigation. This combination empowers users to engage with robots in a more intuitive and efficient manner.
1. Enhanced Communication:
By leveraging the LLaMA model, robots can understand and respond to natural language commands, making it easier for users to interact without needing specialized training or knowledge of robotics. For example, commands such as “navigate to the pallet area” or “move to the charging station” are seamlessly processed, allowing for fluid communication.
2. Autonomous Navigation:
The waypoint navigation system allows the robot to autonomously plan and execute paths to specified locations. Once a command is received, the robot identifies the target waypoint, such as a pallet area or charging station, and calculates the optimal route. This functionality is critical in applications where precise movement is required, such as in warehouses or manufacturing settings.
3. Real-Time Feedback:
Upon reaching a destination, the robot provides immediate feedback to the user. For instance, it might say, “I have successfully reached the pallet area. What would you like me to do next?” This interaction fosters a collaborative environment, where users feel more in control of the robotic operations.
4. Applications Across Industries:
The use case of natural language-based waypoint navigation has wide-ranging applications. In logistics, it can streamline operations by allowing workers to direct robots without interrupting their workflow. In healthcare, such systems can assist in transporting supplies within hospitals, improving efficiency and reducing human error. In the retail sector, autonomous robots can navigate to replenish stock, all while responding to staff queries.
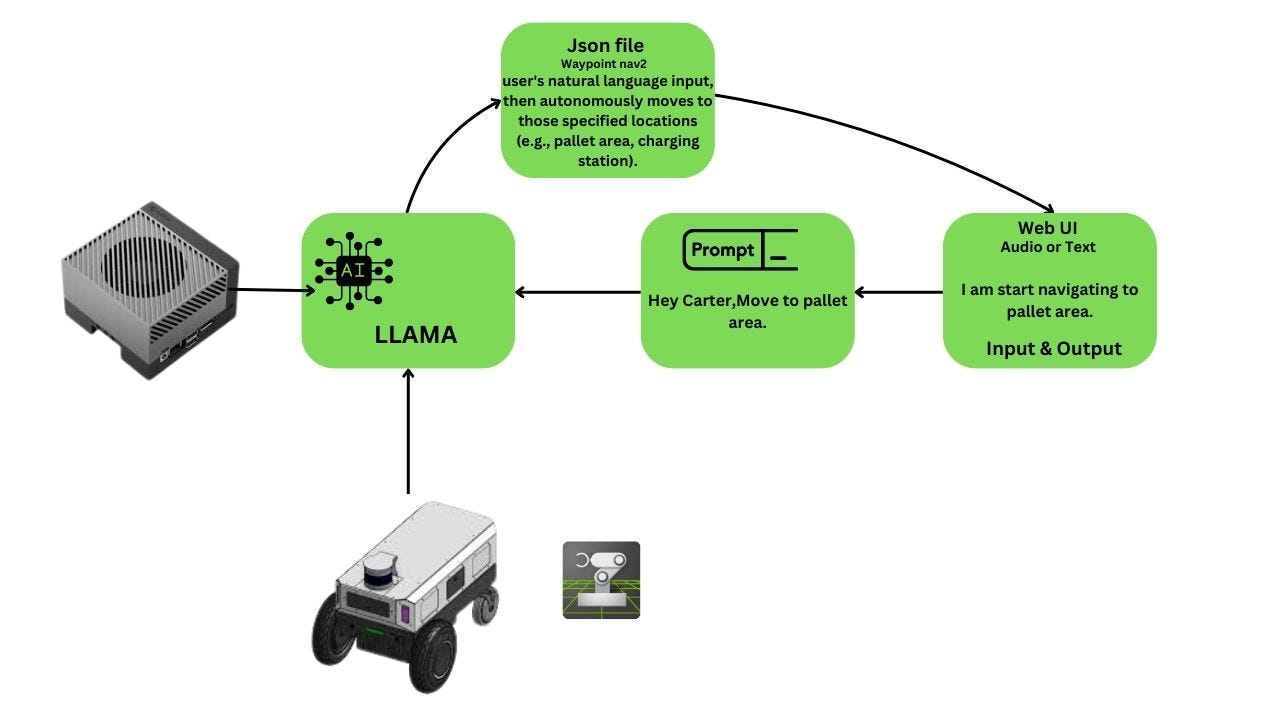
Figure 1
The methodology employed for implementing natural language-based waypoint navigation using the LLaMA model in an autonomous robot environment involves several key components. This section outlines the processes and technologies used, illustrated with Figure 1.
1. System Architecture
The overall architecture consists of multiple modules working together to facilitate communication between the user and the robot. The primary components include:
- User Interface: A web-based interface or terminal that allows users to input natural language commands.
- Natural Language Processing (NLP) Module: Powered by the LLaMA model, this module interprets and generates responses to user commands.
- Navigation Module: This module controls the robot’s movement, utilizing waypoint navigation algorithms to reach designated locations.
- Feedback Mechanism: Once the robot reaches a waypoint, it provides real-time feedback to the user.
Figure 1 above illustrates this system architecture, showcasing the interaction between the various components.
2. Command Interpretation
- The user inputs a command such as “move to the pallet area.” The command is sent to the NLP Module.
- The LLaMA model processes the command, recognizing key phrases and determining the appropriate action.
3. Waypoint Navigation
- After interpreting the command, the Navigation Module receives the target waypoint (e.g., “pallet area”) and calculates the optimal path using algorithms like A* or Dijkstra’s.
- The robot navigates to the waypoint, following the pre-defined path while avoiding obstacles.
4. Feedback and Interaction
- Upon reaching the destination, the robot generates a feedback message, such as “I have successfully reached the pallet area. What would you like me to do next?”
- This feedback is published to the user interface, allowing for continuous interaction and further command inputs.
5. Simulation and Testing
- The entire system is tested and simulated within NVIDIA Isaac Sim, which provides a realistic environment for validating the robot’s navigation capabilities and response generation.
- The Jetson AGX Orin serves as the computational backbone for running the LLaMA model, ensuring efficient processing and real-time response capabilities.
Results
- Testing Outcomes: Discuss the results obtained from simulations conducted in NVIDIA Isaac Sim, including metrics such as navigation accuracy, response time, and user satisfaction.
- Performance Analysis: Analyze how well the LLaMA model interpreted commands and how effectively the robot navigated to the specified waypoints.
- Challenges Faced: Share any challenges encountered during testing, such as misinterpretation of commands or navigation errors, and how they were addressed.
Future Work
- Improvements: Suggest potential improvements, such as enhancing the model’s understanding of complex commands, improving navigation algorithms, or incorporating additional sensors for better obstacle detection.
- Scalability: Discuss how the system could be scaled to support multiple robots or more complex tasks in the future.
As a next step, we aim to integrate advanced Vision-Language Models (VLM) such as ViLA (Vision-Language Alignment) into our system. By incorporating ViLA, the robot will be able to understand and process both visual and language inputs simultaneously, enhancing its ability to interact with the environment. This will allow the robot to not only navigate based on verbal commands but also interpret visual cues such as objects, locations, and landmarks. This fusion of vision and language will greatly expand the robot’s functionality, making it more adaptive and context-aware in complex, dynamic environments.
Conclusion
The core of our implementation revolves around enhancing the robot’s ability to interpret complex commands related to navigation, allowing users to issue directives like “move to the pallet area” or “head to the charging station.” By leveraging the capabilities of the LLaMA model, our system not only interprets these commands but also provides meaningful feedback to users, such as confirming successful navigation and prompting for further instructions. This dynamic interaction significantly improves the usability of robotic systems in various contexts, from industrial automation to healthcare applications.