I am trying to generate a yaml file for using motion generator tool. And I am using Lula Robot Descriptor Editor for that purpose. The manipulator I am using is Panda from the Isaac Examples. And I am using Ubuntu 22.
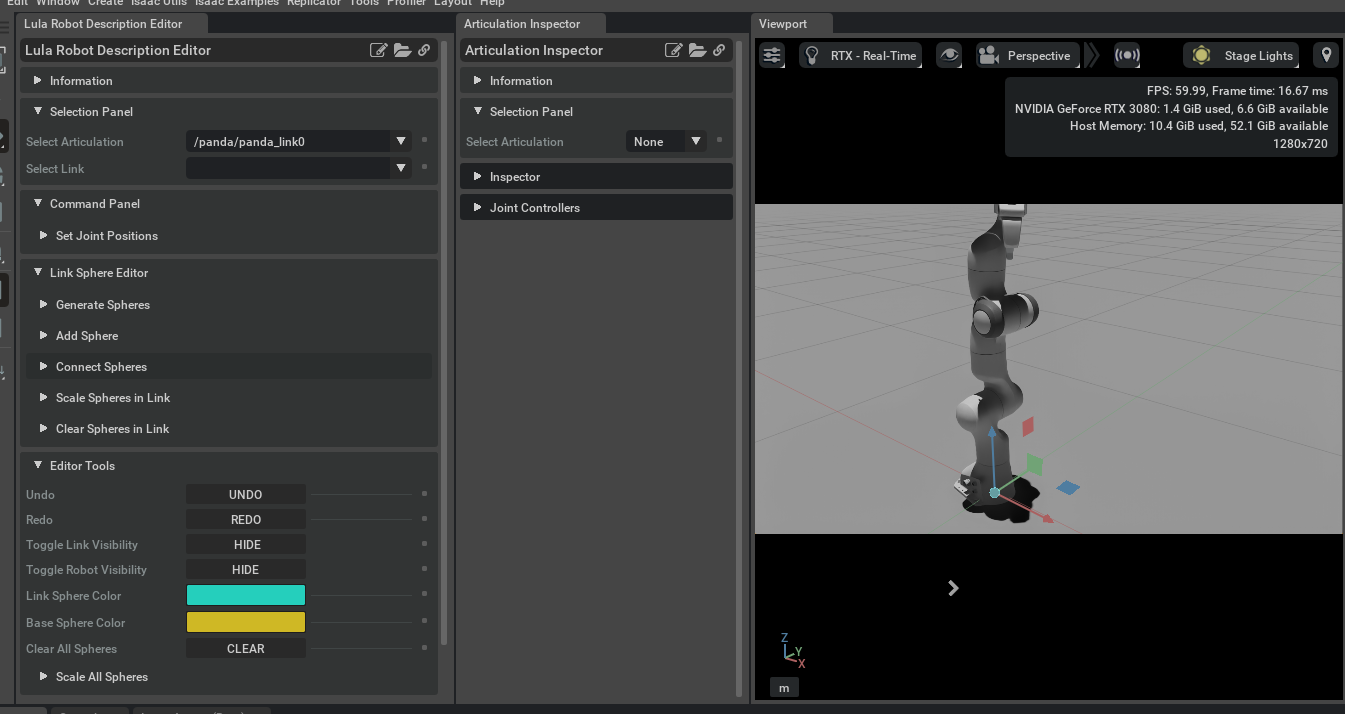
As shown in the picture, At Select Panel > Select Articulation, the selection is /panda/panda_link0. The option is different from the tutorials.
In the tutorials you can select the links in Select Link and only robot name can be selected in Select Articulation, (e.g: Select Articulation: /panda; Select Link: (panda_link0)).
But for my case, Select Articulation: /panda/panda_link0; Select Link: {nothing shown}.
@Simplychenable Thank you for your help. I am able to select the Panda’s links as shown in your videos.
But come to think of it, I cannot generate a yaml file using Lula Robot Descriptor Editor after following the 5.1 tutorials. And I also copied and pasted the Python script to HelloWorld example as well.
that seems to be correct, the snippet you copy/pasted from 5.1.4 to hello_world.py does affect the asset hiearchy a bit, so it won’t be a 1:1 match to the source asset (franka.usd).
regarding generating a yaml file, i would probably recommend checking out section 6.1 of the doc and see if you have everything in order prior to exporting the robot description file (section 6.1.4.4) :
i think the tutorial from 5.1.4 was only to show how you can import URDF via python and not sure if the edited file is meant to be used to generate the yaml, but that’s just my interpretation.
So we need to go to Property > Physics delete the wrong Articulation Root by clicking the X mark at the right side and the add the Articulation Root in /panda not /panda/panda_link0.
Maybe they can consider put this into the tutorial for person who never read the tuts from a to z like me.
the tutorial being chopped up perhaps have made things less contiguous to follow along, as well. would be wonderful if there’s video per section from start to finish with voiceover to keep the continuity (in addition to the subsection as how they have it now for detailed description).
@hslktestmail It looks like you have noticed a bug arising from changes in the URDF importer where the base path of the Articulation is no longer considered to be the Articulation root, violating some assumptions made in the robot description editor. We are aware of this problem, and it will be fixed in the next release. The best fix for now is indeed to change the Articulation root of the asset back to the base path (this can be done with a copy of your USD file so that its not a permanent change and it will not affect the resulting robot description file)