Hi,
I’m currently using the Jetson Orin NX with JetPack 6.2 to run Isaac ROS’s VSLAM and NVBlox functionalities. My camera is a RealSense D430. I followed the setup instructions from the official tutorial, but the results are not as expected.
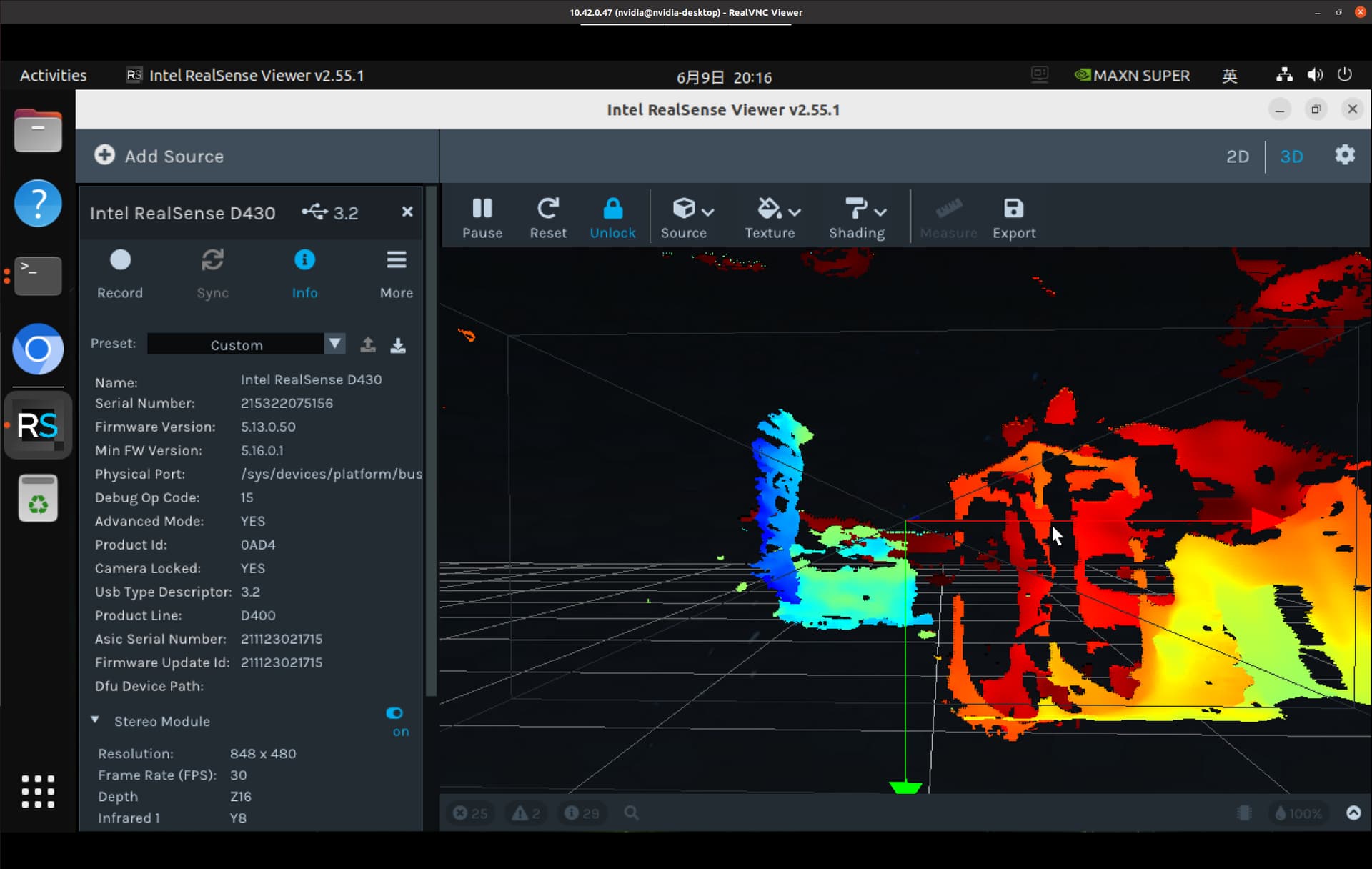
The camera works perfectly outside the Docker container, as shown in the image below:
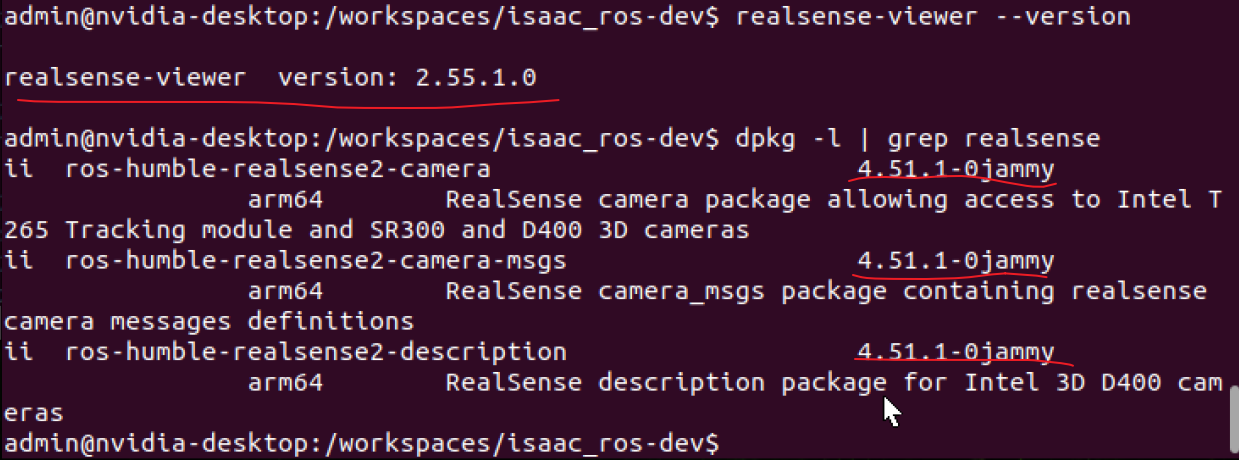
However, when I launch the RealSense Viewer inside the Docker container, the display appears as shown below and is completely unusable. I have verified that the versions of the librealsense SDK and the realsense-ros driver match the versions specified in the official documentation. I also believe that the camera firmware version is consistent with the official requirements. I have searched extensively but haven’t been able to find a solution to this issue.

I believe I have also correctly set up the .isaac_ros_common-config. image below:

I would greatly appreciate any suggestions or solutions to address this problem. Thank you in advance for your help!