Hi When I could use Carter navigation which is reference No.5.
But After clear and re-build new package Carter doesn’t work any more.
created turtlebot 3 is working well.
So, I believe my installation is no problem.
[Issues]
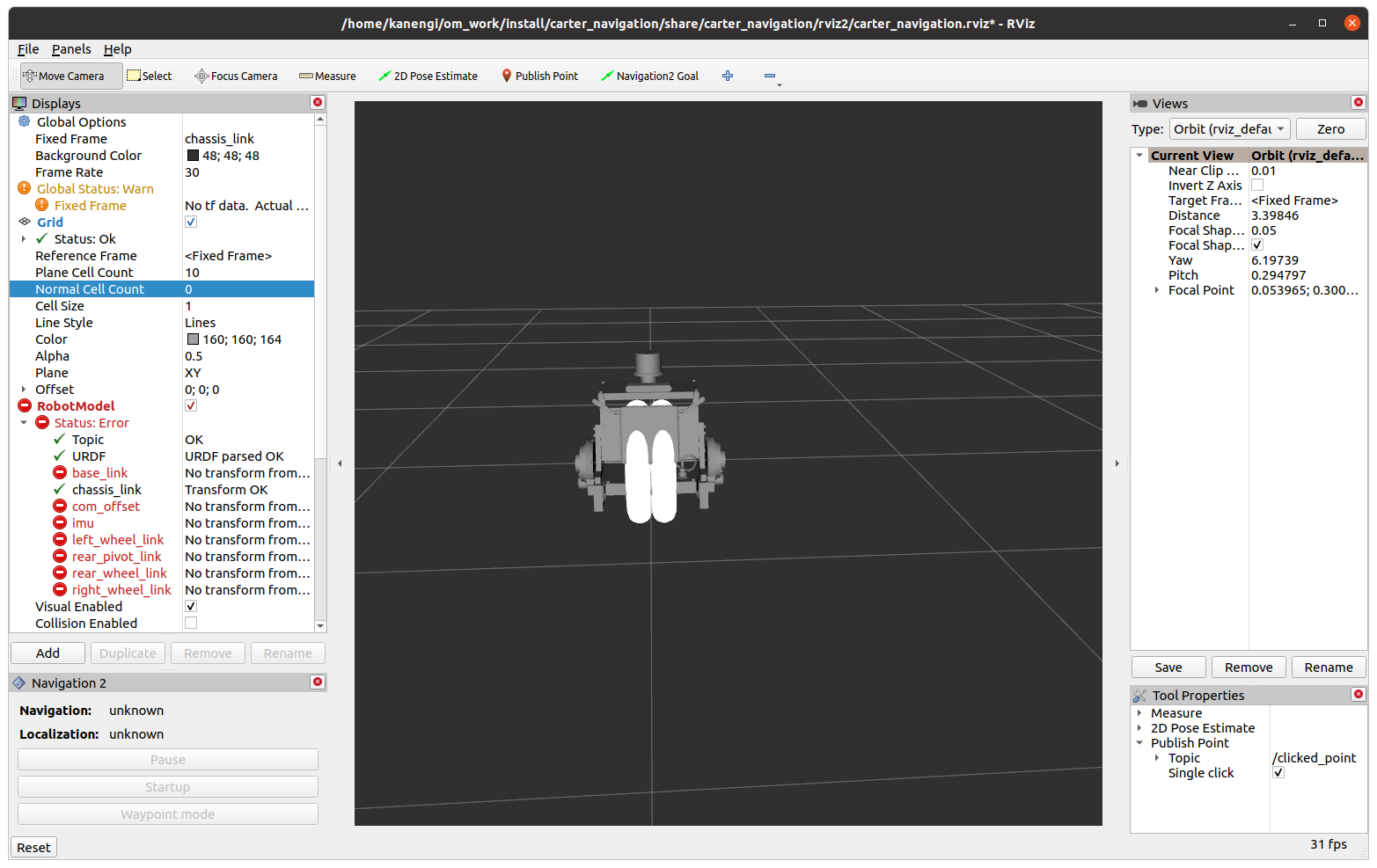
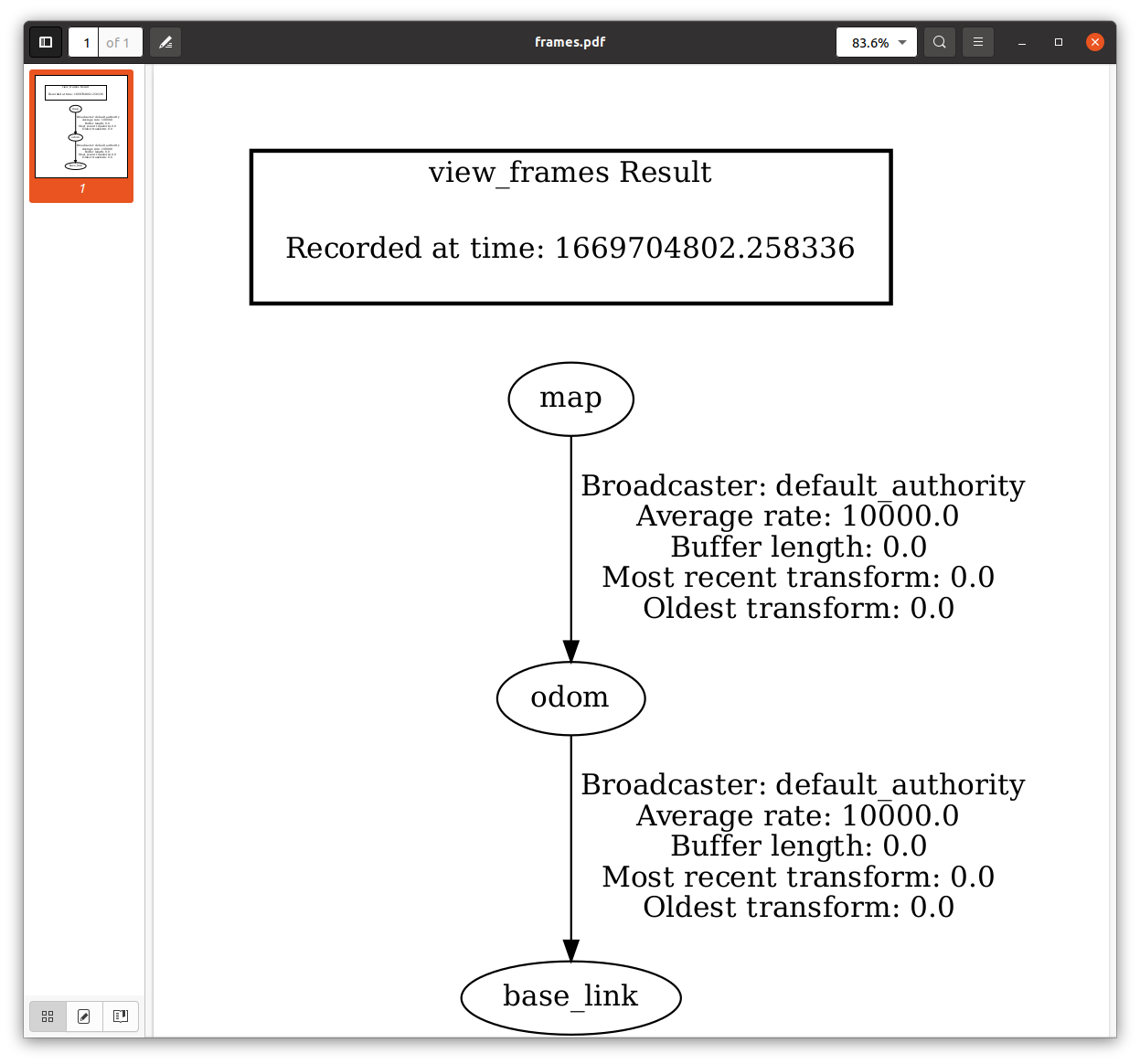
No tf data. Actual error: Frame [map] does not exist
Robot Model status error
Topic OK
URDF parsed OK
No transform from [base_link] to [com_offset]
No transform from [chassis_link] to [com_offset]
No transform from [imu] to [com_offset]
No transform from [left_wheel_link] to [com_offset]
No transform from [rear_pivot_link] to [com_offset]
No transform from [rear_wheel_link] to [com_offset]
No transform from [right_wheel_link] to [com_offset]
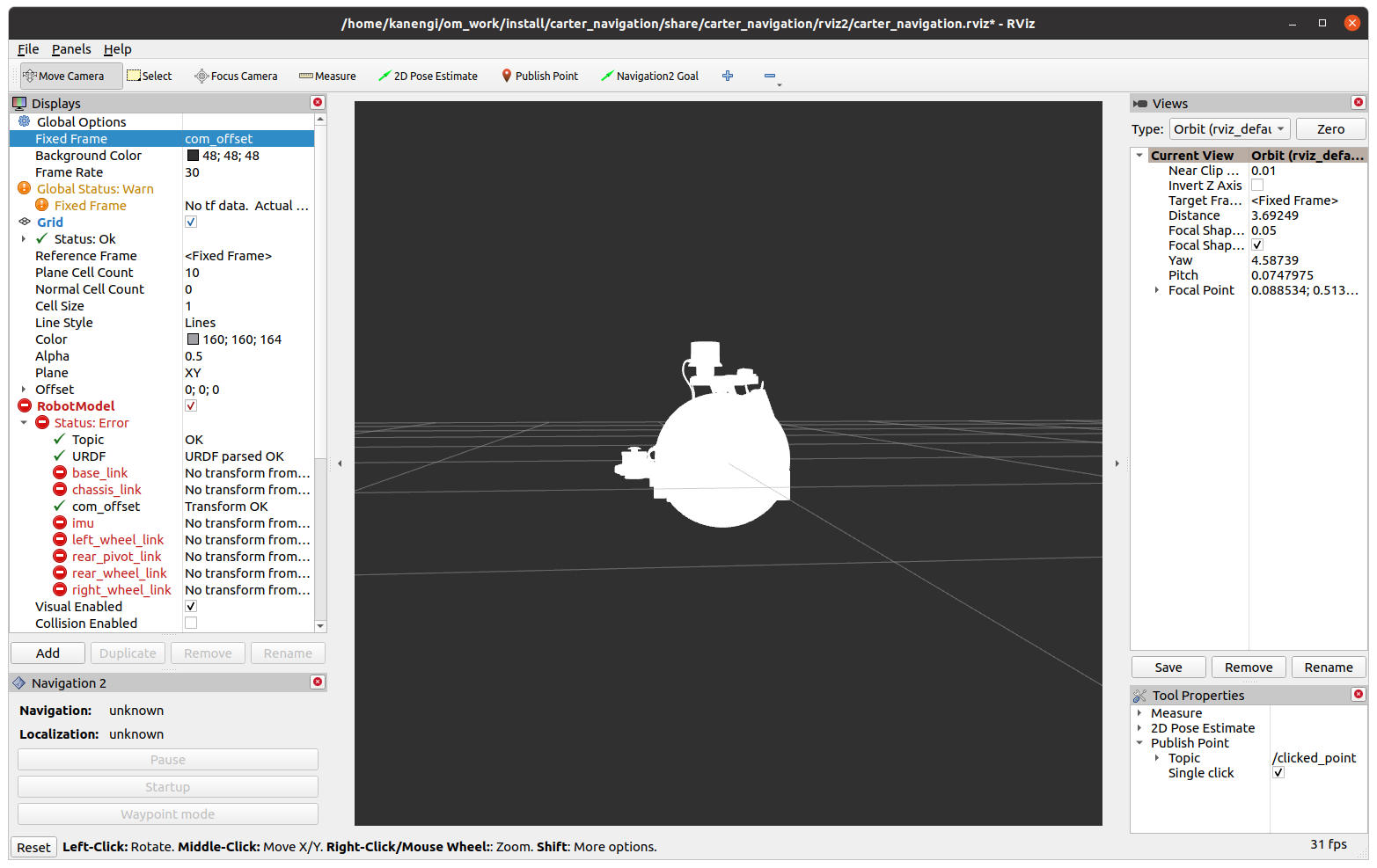
3.Map is visible on the Rviz. But… error is detected.
No map received
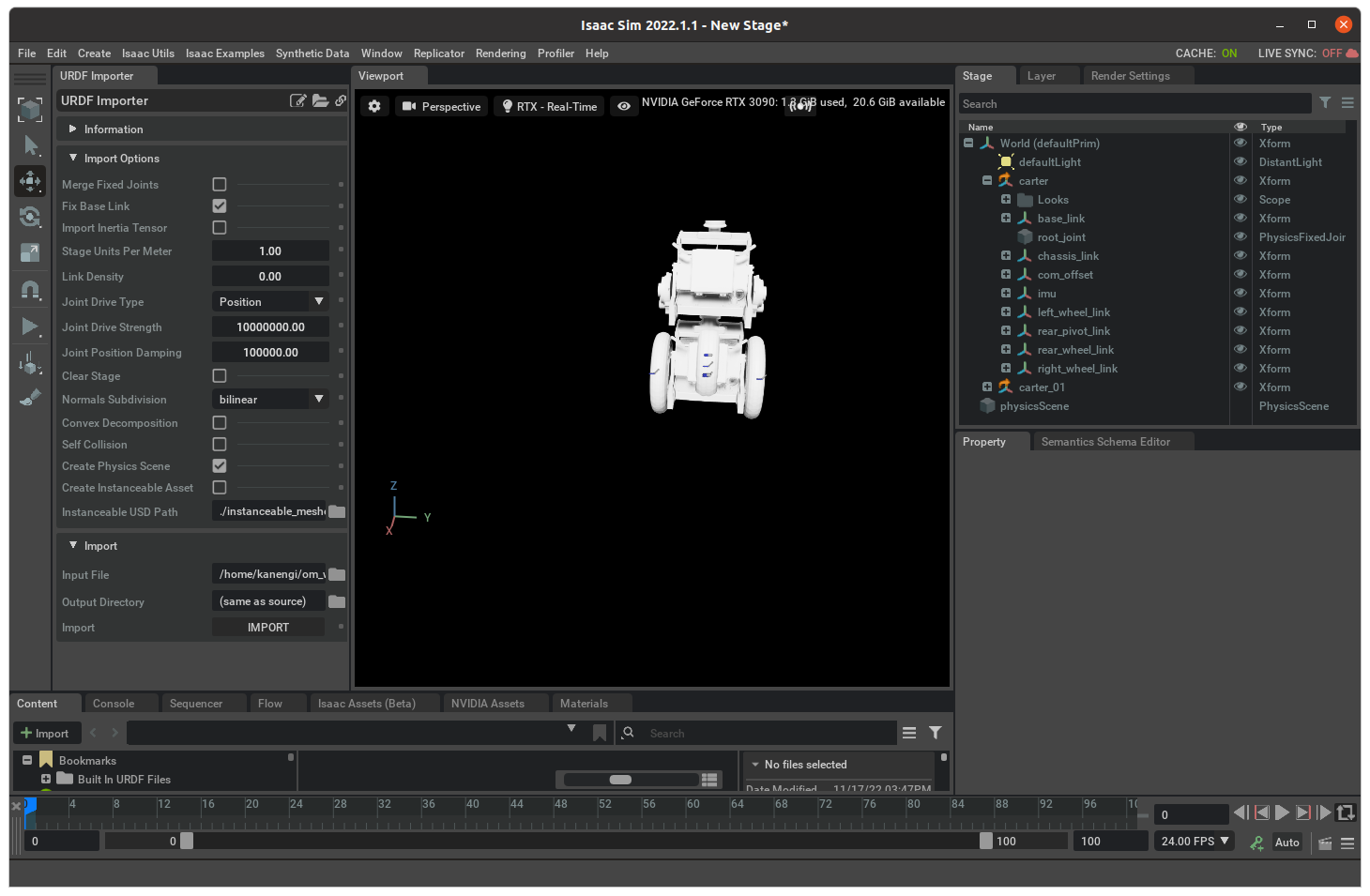
loading carter.urdf file from install folder, but its appearance is curious.
I don’t change any parameter in the carter.urdf and obj files.
ros2 service call /map_server/load_map nav2_msgs/srv/LoadMap “{map_url: carter_warehouse_navigation.yaml}”
usage: ros2 [-h] Call ros2 <command> -h for more detailed usage. …
ros2: error: unrecognized arguments: carter_warehouse_navigation.yaml}”
2022-11-20 09:36:47 [202,339ms] [Warning] [carb] Acquiring non optional plugin interface which is not listed as dependency: [omni::isaac::core_nodes v1.0] (plugin: (null)), by client: omni.isaac.core_nodes. Add it to CARB_PLUGIN_IMPL_DEPS() macro of a client.
[WARN] [1668937029.259971368] [rclcpp]: logging was initialized more than once
[WARN] [1668937051.243900585] [rclcpp]: logging was initialized more than once
After execute command other terminal status is changed.
Blockquote
[rviz2-1] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.13/src/buffer_core.cpp
[rviz2-1] Warning: Invalid frame ID “right_wheel_link” passed to canTransform argument source_frame - frame does not exist
[rviz2-1] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.13/src/buffer_core.cpp
[rviz2-1] Warning: Invalid frame ID “left_wheel_link” passed to canTransform argument source_frame - frame does not exist
[rviz2-1] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.13/src/buffer_core.cpp
[rviz2-1] Warning: Invalid frame ID “rear_wheel_link” passed to canTransform argument source_frame - frame does not exist
[rviz2-1] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.13/src/buffer_core.cpp
[rviz2-1] Warning: Invalid frame ID “right_wheel_link” passed to canTransform argument source_frame - frame does not exist
[rviz2-1] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.13/src/buffer_core.cpp
[rviz2-1] Warning: Invalid frame ID “left_wheel_link” passed to canTransform argument source_frame - frame does not exist
[rviz2-1] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.13/src/buffer_core.cpp
[rviz2-1] Warning: Invalid frame ID “rear_wheel_link” passed to canTransform argument source_frame - frame does not exist
[rviz2-1] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.13/src/buffer_core.cpp
[rviz2-1] Warning: Invalid frame ID “right_wheel_link” passed to canTransform argument source_frame - frame does not exist
[rviz2-1] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.13/src/buffer_core.cpp
[rviz2-1] Warning: Invalid frame ID “left_wheel_link” passed to canTransform argument source_frame - frame does not exist
[rviz2-1] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.13/src/buffer_core.cpp
[rviz2-1] Warning: Invalid frame ID “rear_wheel_link” passed to canTransform argument source_frame - frame does not exist
[rviz2-1] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.13/src/buffer_core.cpp
[rviz2-1] Warning: Invalid frame ID “right_wheel_link” passed to canTransform argument source_frame - frame does not exist
[rviz2-1] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.13/src/buffer_core.cpp
[rviz2-1] Warning: Invalid frame ID “left_wheel_link” passed to canTransform argument source_frame - frame does not exist
[rviz2-1] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.13/src/buffer_core.cpp
[rviz2-1] Warning: Invalid frame ID “rear_wheel_link” passed to canTransform argument source_frame - frame does not exist
[rviz2-1] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.13/src/buffer_core.cpp
[rviz2-1] Warning: Invalid frame ID “right_wheel_link” passed to canTransform argument source_frame - frame does not exist
[rviz2-1] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.13/src/buffer_core.cpp
^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT)
[rviz2-1] Warning: Invalid frame ID “left_wheel_link” passed to canTransform argument source_frame - frame does not exist