Hi I’m facing trouble ROS2 connection issue as title .
Please let me introduce my system/ process
How should I avoid this error and working carter well?
Compiled against Qt version 5.12.8.
Compiled against OGRE version 1.12.1 (Rhagorthua).
TF2
IsaacSIM: 2022.1.0
ROS_VERSION=2
ROS_PYTHON_VERSION=3
ROS_LOCALHOST_ONLY=0
ROS_DISTRO=foxy
ROS2 bridge is implemented
https://docs.omniverse.nvidia.com/app_isaacsim/app_isaacsim/tutorial_ros2_navigation.html
-build by colcon build
simple communication ROS2 command is no problem.(Hello - response)
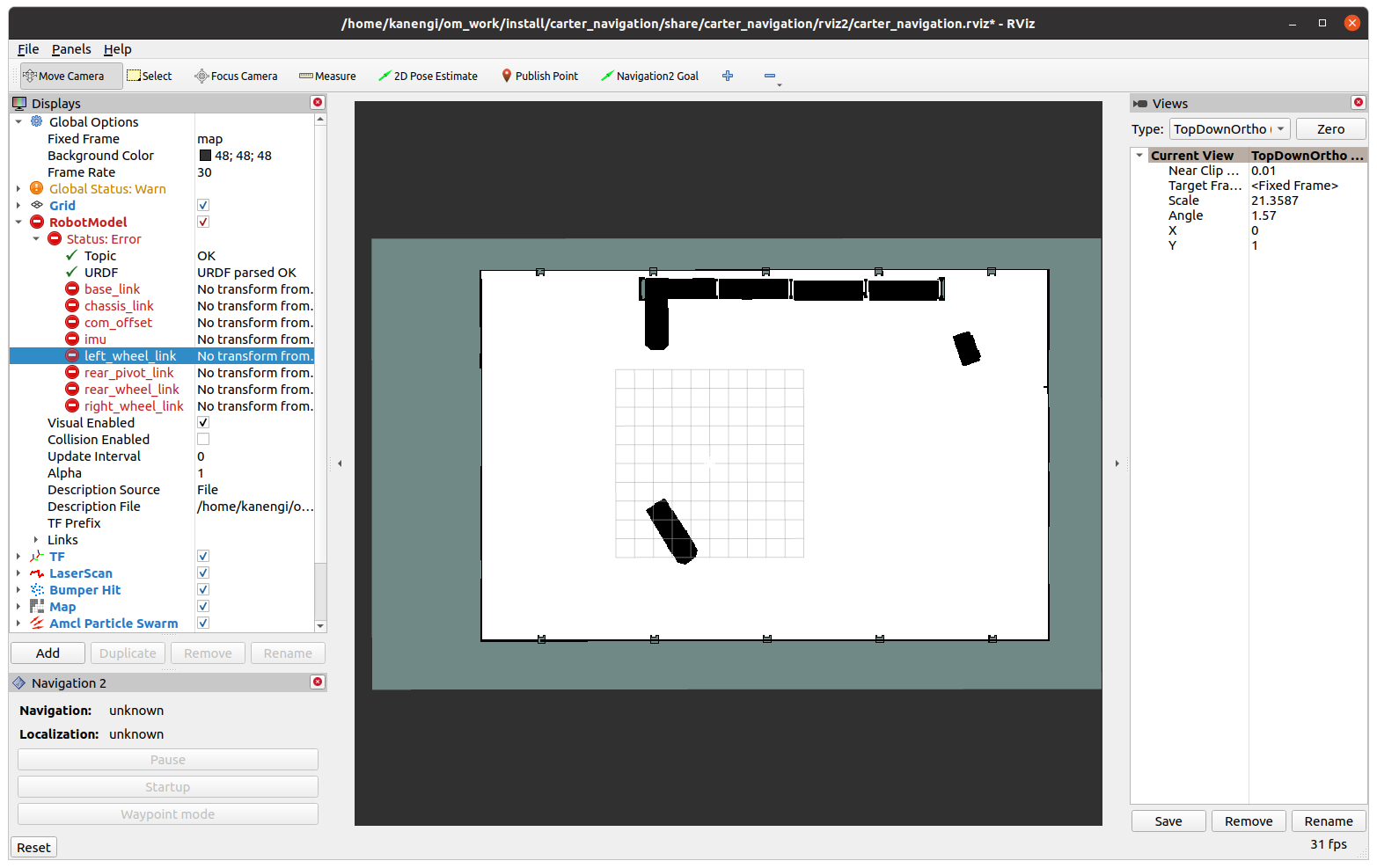
[rviz2-1] Warning: Invalid frame ID “map” passed to canTransform argument target_frame - frame does not exist
[rviz2-1] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.13/src/buffer_core.cpp
[rviz2-1] Warning: Invalid frame ID “map” passed to canTransform argument target_frame - frame does not exist
[rviz2-1] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.13/src/buffer_core.cpp
[rviz2-1] Warning: Invalid frame ID “map” passed to canTransform argument target_frame - frame does not exist
[rviz2-1] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.13/src/buffer_core.cpp
[rviz2-1] Warning: Invalid frame ID “map” passed to canTransform argument target_frame - frame does not exist
[rviz2-1] at line 133 in /tmp/binarydeb/ros-foxy-tf2-0.13.13/src/buffer_core.cpp
I thought about this issue in the ROS forum. But this symptom is not occurred turtlebot3 gazebo with Rviz2. That's why I will ask isaacSIM developer's opinion first. [carterROS2pkg.txt|attachment][controller_server-5] [INFO] [1668046253.840788145] [local_costmap.local_costmap]: Timed out waiting for transform from base_link to odom to become available, tf error: Invalid frame ID “odom” passed to canTransform argument target_frame - frame does not exist
carterROS2pkg.txt (16.4 KB)
costmaperror (38.3 KB)