2022-11-28 07:12:47 [2,157,011ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/rear_wheel_link
2022-11-28 07:12:47 [2,157,011ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/right_wheel_link
2022-11-28 07:12:47 [2,157,012ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/left_wheel_link
2022-11-28 07:12:47 [2,157,033ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/rear_wheel_link
2022-11-28 07:12:47 [2,157,034ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/right_wheel_link
2022-11-28 07:12:47 [2,157,034ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/left_wheel_link
2022-11-28 07:12:47 [2,157,215ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/rear_wheel_link
2022-11-28 07:12:47 [2,157,216ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/right_wheel_link
2022-11-28 07:12:47 [2,157,216ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/left_wheel_link
2022-11-28 07:12:49 [2,159,707ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/rear_wheel_link
2022-11-28 07:12:49 [2,159,707ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/right_wheel_link
2022-11-28 07:12:49 [2,159,707ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/left_wheel_link
2022-11-28 07:12:49 [2,159,764ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/rear_wheel_link
2022-11-28 07:12:49 [2,159,765ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/right_wheel_link
2022-11-28 07:12:49 [2,159,765ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/left_wheel_link
2022-11-28 07:12:49 [2,159,787ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/rear_wheel_link
2022-11-28 07:12:49 [2,159,787ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/right_wheel_link
2022-11-28 07:12:49 [2,159,788ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/left_wheel_link
2022-11-28 07:12:50 [2,159,958ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/rear_wheel_link
2022-11-28 07:12:50 [2,159,959ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/right_wheel_link
2022-11-28 07:12:50 [2,159,959ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/left_wheel_link
2022-11-28 07:12:51 [2,161,266ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/rear_wheel_link
2022-11-28 07:12:51 [2,161,266ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/right_wheel_link
2022-11-28 07:12:51 [2,161,267ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/left_wheel_link
2022-11-28 07:12:51 [2,161,286ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/rear_wheel_link
2022-11-28 07:12:51 [2,161,287ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/right_wheel_link
2022-11-28 07:12:51 [2,161,287ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/left_wheel_link
2022-11-28 07:12:51 [2,161,325ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/rear_wheel_link
2022-11-28 07:12:51 [2,161,325ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/right_wheel_link
2022-11-28 07:12:51 [2,161,326ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/left_wheel_link
2022-11-28 07:12:51 [2,161,384ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/rear_wheel_link
2022-11-28 07:12:51 [2,161,384ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/right_wheel_link
2022-11-28 07:12:51 [2,161,385ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/left_wheel_link
2022-11-28 07:12:51 [2,161,441ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/rear_wheel_link
2022-11-28 07:12:51 [2,161,441ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/right_wheel_link
2022-11-28 07:12:51 [2,161,441ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/left_wheel_link
2022-11-28 07:12:51 [2,161,461ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/rear_wheel_link
2022-11-28 07:12:51 [2,161,461ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/right_wheel_link
2022-11-28 07:12:51 [2,161,462ms] [Error] [omni.physx.plugin] Transformation change on non-root links is not supported. Link: /World/Carter_ROS/left_wheel_link
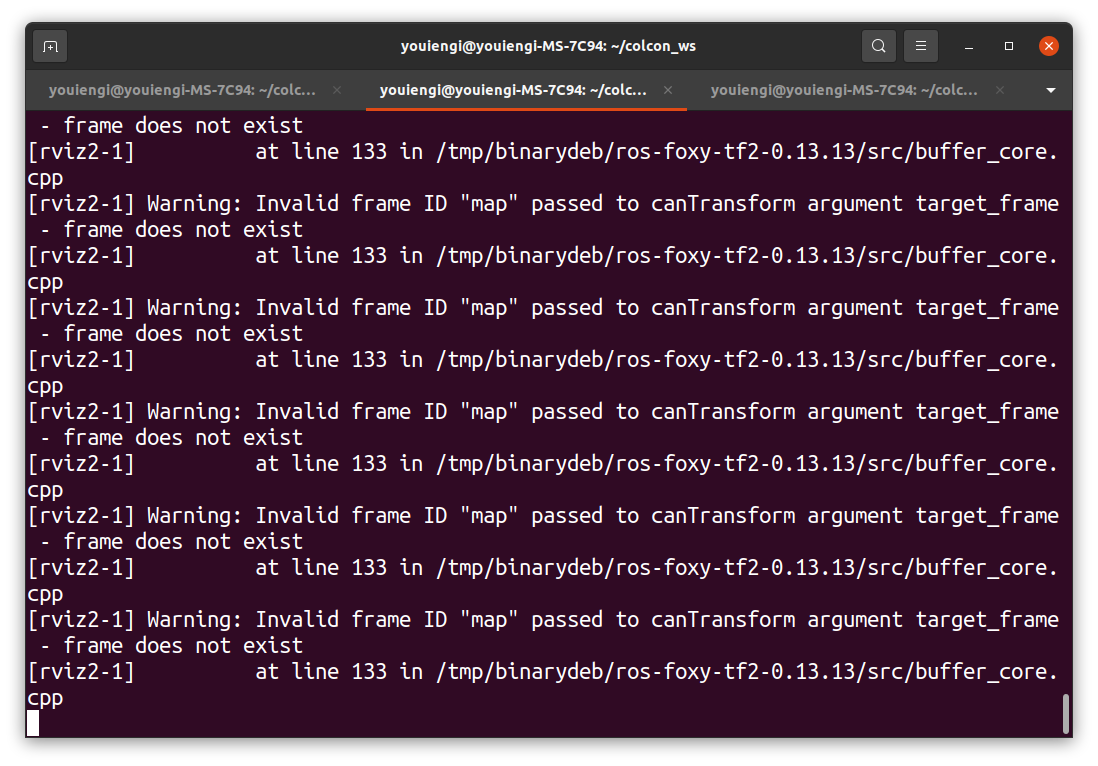
on the terminal all status input. but cost map is not found yet.