I am using Jetson Xavier NX board booted with the sdcard image released for the same.
Working on GitHub - dusty-nv/ros_deep_learning: Deep learning inference nodes for ROS / ROS2 with support for NVIDIA Jetson and TensorRT :
I have tried Detectnet functionality from V4l2 camera (USB Webcam at 640x480 resolution).
On execution faced error as shown :
roslaunch ros_deep_learning detectnet.ros1.launch input:=v4l2:///dev/video0 output:=/home/mistral/out.mp4
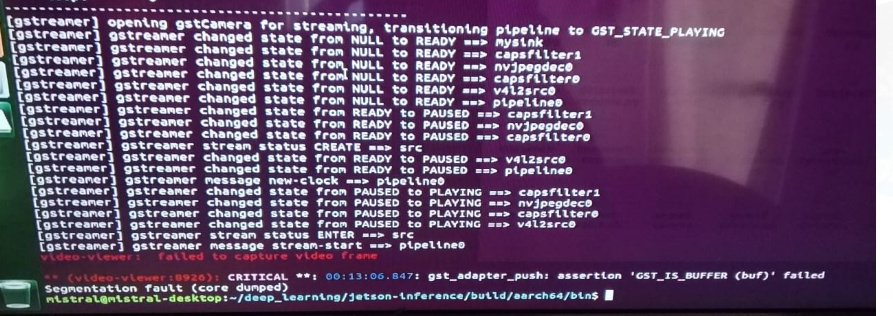
Any suggestion on the right way of starting video capture from /dev/video0 and perform image detection using Ros_Deep_learning ?
Or to check the input & output codec information since video-viewer is working fine and I’m able to see camera captures …
Thanks,
Yash M J