following this question, I wonder how articulation sensor work? Or what force it will sense? stress, or external force.
I build a manipulator like this, with upper arm mass 1kg:
But I’m not sure what’s the force sensor has read.
When upper arm stand with joint 0 degree, the force sensor get -9.8N:
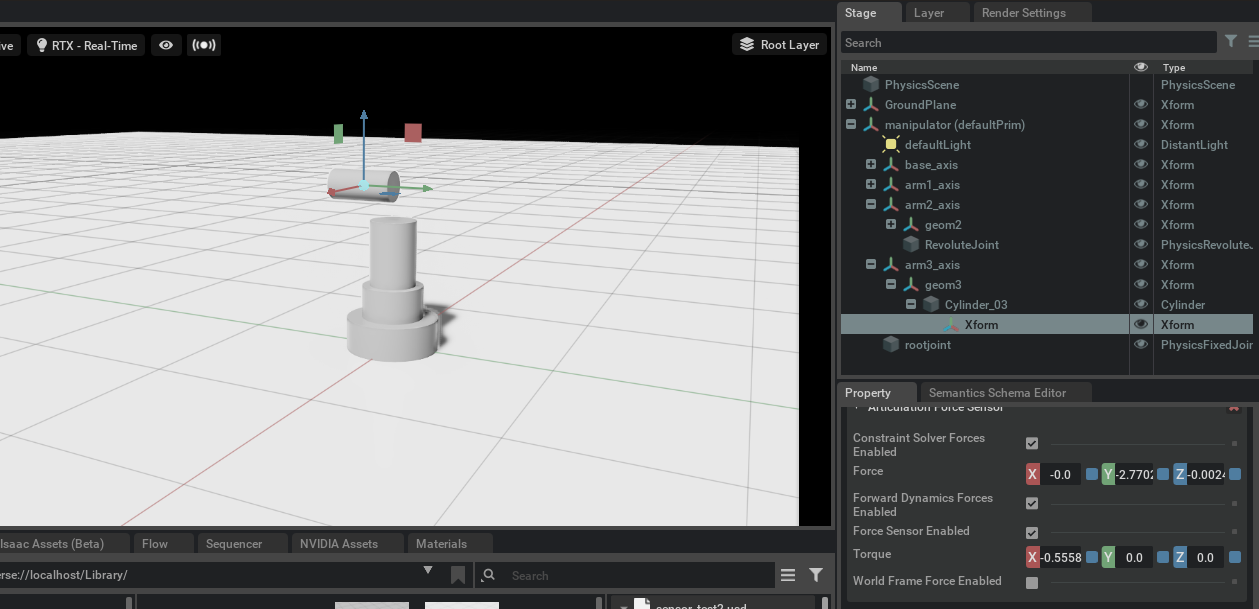
But when upper arm lie down with joint 90 degree, the force sensor get -2.77N
considering external force, this doesn’t make sense, neither nor inner force like stress.
And I change the joint position of upper arm from side to center, get more strange result:
The force get 9.8 at any degree.
Next, I put upper arm at higher postion with joint at the side of higher postion:
But the force sensor also get -2.77N. It seems that the reading is related to the relative position of upper arm and it’s joint.
So I want to know what value does this sensor read?
For convenience, I upload my test model to help everyone test the function of articulation force sensor.
sensor_test2.usd (5.5 KB)
1 Like
I analysis the 90 degree situation using Mechanics of Materials. But -2.77N is incompatible with the compressive or shear stress, so how to get understanding about the articulation force sensor?
The torque acted on the “cylinder3” is -0.5558 Nm. The length of the cylinder is 0.4m, so from the center to the link the distance is 0.2m. torque(-0.5558Nm) / dist(0.2m) = -0.27779N, which is the force you are getting.
I think the force sensor is measuring the forces acted only on the link not the whole body nor tip.
But in fact, the weight of upper arm is 1kg, which means the force of Y axis is 9.8N. The 2.77 doesn’t make sense.
Hi - Sorry for the delay in the response. Let us know if you still having this issue with the latest Isaac Sim 2022.2.1 release.
We have released new APIs to capture articulation joint forces for the 2023 release. The old APIs are now deprecated.