Software environment
- deepstream5.0
- Linux version 5.4.0-53-generic (buildd@lgw01-amd64-046) (gcc version 7.5.0 (Ubuntu 7.5.0-3ubuntu1~18.04)) #59~18.04.1-Ubuntu
New requirements
Question
I am very interested in this project Deepstream 360D Smart parking application .So I have reproduced this project.Now,I want to make some changes to this project.
- I have reproduced this project
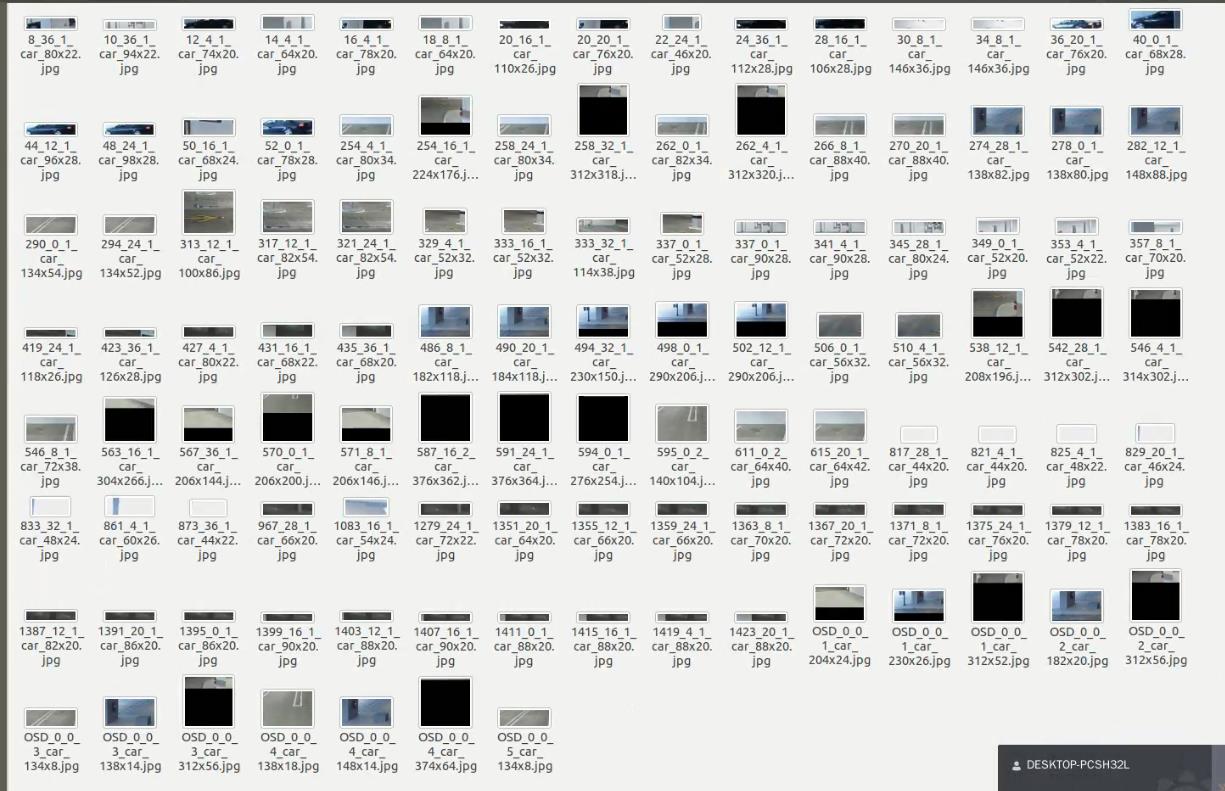
deepstream_image_meta_test.So I want to save images which are detected by pgie in smart parking using the way deepstream_image_meta_test mentioned.But,I don’t know how to do it! - I made some attempts,but I get wrong jpeg like thisimg.jpg the car pictures are not shown as planned. here is my code below.Please teach me how to do it,Thank you very much
{kind=link}
PROBE
// NVGSTDS_ELEM_ADD_PROBE(pipeline->common_elements.primary_bbox_buffer_probe_id,
// pipeline->common_elements.primary_gie_bin.bin, "src",
// gie_primary_processing_done_buf_prob, GST_PAD_PROBE_TYPE_BUFFER,
// pipeline->common_elements.appCtx);
//I write a probe myself
GstPad *pgie_src_pad = gst_element_get_static_pad(pipeline->common_elements.primary_gie_bin.bin, "src");
gst_pad_add_probe(pgie_src_pad, GST_PAD_PROBE_TYPE_BUFFER, jpeg_stream_process,
(gpointer)pipeline->common_elements.appCtx->obj_ctx_handle, NULL);
gst_object_unref(pgie_src_pad);
jpeg_stream_process():
this is not different from pgie_src_pad_buffer_probe in deepstream_image_meta_test.
static GstPadProbeReturn
jpeg_stream_process(GstPad *pad, GstPadProbeInfo *info, gpointer ctx)
{
GstBuffer *buf = (GstBuffer *)info->data;
GstMapInfo inmap = GST_MAP_INFO_INIT;
if (!gst_buffer_map(buf, &inmap, GST_MAP_READ))
{
NVGSTDS_ERR_MSG_V("input buffer mapinfo failed");
return GST_PAD_PROBE_DROP;
}
NvBufSurface *ip_surf = (NvBufSurface *)inmap.data;
gst_buffer_unmap(buf, &inmap);
NvDsObjectMeta *obj_meta = NULL;
guint vehicle_count = 0;
guint person_count = 0;
NvDsMetaList *l_frame = NULL;
NvDsMetaList *l_obj = NULL;
NvDsBatchMeta *batch_meta = gst_buffer_get_nvds_batch_meta(buf);
for (l_frame = batch_meta->frame_meta_list; l_frame != NULL; l_frame = l_frame->next)
{
NvDsFrameMeta *frame_meta = (NvDsFrameMeta *)(l_frame->data);
guint num_rects = 0;
for (l_obj = frame_meta->obj_meta_list; l_obj != NULL; l_obj = l_obj->next)
{
obj_meta = (NvDsObjectMeta *)(l_obj->data);
if (obj_meta->class_id == 0)
{
vehicle_count++;
num_rects++;
NVGSTDS_INFO_MSG_V("zzh info:class_id=%d class label=%s confidence=%f", obj_meta->class_id, obj_meta->obj_label, obj_meta->confidence);
}
if (obj_meta->class_id == 1)
{
person_count++;
num_rects++;
}
/* Conditions that user needs to set to encode the detected objects of
* interest. Here, by default all the detected objects are encoded.
*/
if ((obj_meta->class_id == 0))
{
NvDsObjEncUsrArgs userData = {0};
/* To be set by user */
userData.saveImg = save_img;
userData.attachUsrMeta = attach_user_meta;
/* Preset */
userData.objNum = num_rects;
/*Main Function Call */
nvds_obj_enc_process((NvDsObjEncCtxHandle)ctx, &userData, ip_surf, obj_meta, frame_meta);
}
}
}
nvds_obj_enc_finish((NvDsObjEncCtxHandle)ctx);
return GST_PAD_PROBE_OK;
}
obj_ctx_handle
gboolean
create_pipeline(AppCtx *appCtx,
bbox_generated_callback bbox_generated_post_analytics_cb,
bbox_generated_callback all_bbox_generated_cb,
perf_callback perf_cb,
overlay_graphics_callback overlay_graphics_cb)
{
gboolean ret = FALSE;
NvDsPipeline *pipeline = &appCtx->pipeline;
NvDsConfig *config = &appCtx->config;
GstBus *bus;
GstElement *last_elem;
GstElement *tmp_elem1;
GstElement *tmp_elem2;
guint i;
GstPad *fps_pad;
gulong latency_probe_id;
_dsmeta_quark = g_quark_from_static_string(NVDS_META_STRING);
appCtx->all_bbox_generated_cb = all_bbox_generated_cb;
appCtx->bbox_generated_post_analytics_cb = bbox_generated_post_analytics_cb;
appCtx->overlay_graphics_cb = overlay_graphics_cb;
/*here is my obj_ctx_handle*/
NvDsObjEncCtxHandle obj_ctx_handle = nvds_obj_enc_create_context();
if (!obj_ctx_handle)
{
NVGSTDS_ERR_MSG_V("erro");
goto done;
}
appCtx->obj_ctx_handle = obj_ctx_handle;
//...
// ...some codes are omitted here
}
obj_ctx_handle define
struct _AppCtx
{
gboolean version;
gboolean cintr;
gboolean show_bbox_text;
gboolean seeking;
gboolean quit;
gint person_class_id;
gint car_class_id;
gint return_value;
guint index;
GMutex app_lock;
GCond app_cond;
NvDsPipeline pipeline;
NvDsConfig config;
NvDsInstanceData instance_data[MAX_SOURCE_BINS];
NvDsAppPerfStructInt perf_struct;
bbox_generated_callback bbox_generated_post_analytics_cb;
bbox_generated_callback all_bbox_generated_cb;
overlay_graphics_callback overlay_graphics_cb;
NvDsFrameLatencyInfo *latency_info;
GMutex latency_lock;
//this is my new add
NvDsObjEncCtxHandle obj_ctx_handle;
};