Hi @toni.sm
There is no message from the console.
I will send you the .usd and code to give you more information.
import omni.ext
import omni.ui as ui
from pxr import Gf
import carb
import omni.usd
import omni.ext
import omni.ui as ui
import omni.physx as _physx
from omni.kit.menu.utils import add_menu_items, remove_menu_items, MenuItemDescription
from pxr import UsdGeom
import math
from omni.isaac.ui.ui_utils import (
setup_ui_headers,
get_style,
btn_builder,
xyz_builder,
add_separator,
dropdown_builder,
combo_floatfield_slider_builder,
)
import omni
import asyncio
import gc
import weakref
import numpy as np
from omni.isaac.dynamic_control import _dynamic_control
from .utils.simple_robot_controller import RobotController
from omni.isaac.core.utils.stage import set_stage_up_axis
from omni.isaac.core.utils.prims import create_prim
from omni.isaac.core import PhysicsContext
from omni.isaac.core.utils.nucleus import find_nucleus_server
from omni.isaac.range_sensor import _range_sensor
EXTENSION_NAME = "AMR Navigation"
def create_xyz(init={"X": 100, "Y": 100, "Z": 0}):
all_axis = ["X", "Y", "Z"]
colors = {"X": 0xFF5555AA, "Y": 0xFF76A371, "Z": 0xFFA07D4F}
float_drags = {}
for axis in all_axis:
with ui.HStack():
with ui.ZStack(width=15):
ui.Rectangle(
width=15,
height=20,
style={"background_color": colors[axis], "border_radius": 3, "corner_flag": ui.CornerFlag.LEFT},
)
ui.Label(axis, name="transform_label", alignment=ui.Alignment.CENTER)
float_drags[axis] = ui.FloatDrag(name="transform", min=-1000000, max=1000000, step=1, width=100)
float_drags[axis].model.set_value(init[axis])
return float_drags
class Extension(omni.ext.IExt):
def on_startup(self, ext_id: str):
"""Initialize extension and UI elements"""
self._ext_id = ext_id
self._timeline = omni.timeline.get_timeline_interface()
self._viewport = omni.kit.viewport.get_default_viewport_window()
self._usd_context = omni.usd.get_context()
self._stage = self._usd_context.get_stage()
self.lidarInterface = _range_sensor.acquire_lidar_sensor_interface()
self._window = None
# self._window = ui.Window(EXTENSION_NAME, width=500, height=175, visible=False)
# self._window.set_visibility_changed_fn(self._on_window)
menu_items = [
MenuItemDescription(name=EXTENSION_NAME, onclick_fn=lambda a=weakref.proxy(self): a._menu_callback())
]
self._menu_items = [MenuItemDescription(name="Demos", sub_menu=menu_items)]
add_menu_items(self._menu_items, "Isaac Examples")
self._dc = _dynamic_control.acquire_dynamic_control_interface()
self._build_ui()
self._setup_done = False
self._rc = None
def _menu_callback(self):
self._window.visible = not self._window.visible
def _on_window(self, visible):
if self._window.visible:
self._sub_stage_event = self._usd_context.get_stage_event_stream().create_subscription_to_pop(
self._on_stage_event
)
else:
self._sub_stage_event = None
def _build_ui(self):
if not self._window:
self._window = ui.Window(
title=EXTENSION_NAME, width=0, height=0, visible=False, dockPreference=ui.DockPreference.LEFT_BOTTOM
)
self._window.set_visibility_changed_fn(self._on_window)
with self._window.frame:
with ui.VStack(spacing=5, height=0):
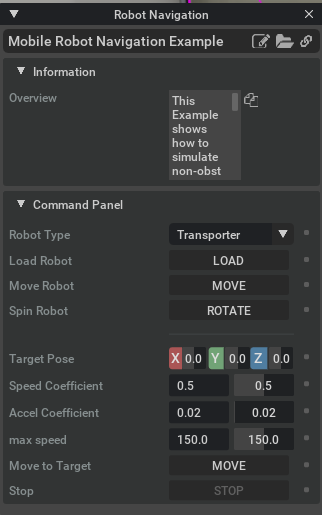
title = "Mobile Robot Navigation Example"
doc_link = (
"https://docs.omniverse.nvidia.com/app_isaacsim/app_isaacsim/manual_omni_isaac_demos.html"
)
overview = "This Example shows how to simulate non-obstacle based navigation in Isaac Sim."
overview += "\n\nPick a mobile robot to load into the Scene, and then press PLAY to simulate."
overview += "\n\nPress the 'Open in IDE' button to view the source code."
setup_ui_headers(self._ext_id, __file__, title, doc_link, overview)
frame = ui.CollapsableFrame(
title="Command Panel",
height=0,
collapsed=False,
style=get_style(),
style_type_name_override="CollapsableFrame",
horizontal_scrollbar_policy=ui.ScrollBarPolicy.SCROLLBAR_AS_NEEDED,
vertical_scrollbar_policy=ui.ScrollBarPolicy.SCROLLBAR_ALWAYS_ON,
)
with frame:
with ui.VStack(style=get_style(), spacing=5):
args = {
"label": "Robot Type",
"default_val": 0,
"tooltip": "Select which type of Robot to load",
"items": ["AMR"],
}
self._robot_option = dropdown_builder(**args)
args = {
"label": "Load Robot",
"type": "button",
"text": "Load",
"tooltip": "Load a mobile robot into the Scene",
"on_clicked_fn": self._on_environment_setup,
}
self._load_btn = btn_builder(**args)
args = {
"label": "Move Robot",
"type": "button",
"text": "Move",
"tooltip": "Move the robot Forward",
"on_clicked_fn": self._on_move_fn,
}
self._move_btn = btn_builder(**args)
args = {
"label": "Spin Robot",
"type": "button",
"text": "Rotate",
"tooltip": "Rotate the robot",
"on_clicked_fn": self._on_rotate_fn,
}
self._rotate_btn = btn_builder(**args)
add_separator()
args = {
"label": "Target Pose",
"axis_count": 3,
"min": -1000,
"max": 1000,
"step": 1,
"tooltip": "Pose is specified as (X, Y, theta)",
}
self.goal_coord = xyz_builder(**args)
args = {"label": "Speed Coefficient", "default_val": 0.5, "min": 0, "max": 1, "step": 0.05}
self._start_vel, _ = combo_floatfield_slider_builder(**args)
args = {"label": "Accel Coefficient", "default_val": 0.02, "min": 0, "max": 1, "step": 0.01}
self._start_acc, _ = combo_floatfield_slider_builder(**args)
args = {"label": "max speed", "default_val": 150.0, "min": 0, "max": 300.0, "step": 1}
self._max_speed, _ = combo_floatfield_slider_builder(**args)
args = {
"label": "Move to Target",
"type": "button",
"text": "Move",
"tooltip": "Move robot to target pose",
"on_clicked_fn": self._on_navigate_fn,
}
self._navigate_btn = btn_builder(**args)
args = {
"label": "Stop",
"type": "button",
"text": "Stop",
"tooltip": "Pause the robot when navigating",
"on_clicked_fn": self._on_navigate_stop_fn,
}
self._stop_btn = btn_builder(**args)
self._stop_btn.enabled = False
ui.Spacer()
async def _create_robot(self, task):
done, pending = await asyncio.wait({task})
if task in done:
print("Loading Robot Enviornment")
# self._viewport.set_camera_position("/OmniverseKit_Persp", 300, 300, 100, True)
self._viewport.set_camera_position("/OmniverseKit_Persp", 300, 300, 300, True)
self._viewport.set_camera_target("/OmniverseKit_Persp", 0, 0, 0, True)
self._stage = self._usd_context.get_stage()
result, nucleus_server = find_nucleus_server()
if result is False:
carb.log_error("Could not find nucleus server with /Isaac folder")
return
self._asset_path = nucleus_server + "/Isaac"
current_robot_index = self._robot_option.get_item_value_model().as_int
self._robot_prim_path = "/robot"
if current_robot_index == 0:
asset_path = nucleus_server + "/Projects" + "/test"
robot_usd = asset_path + "/mk3_third.usd"
self._robot_chassis = self._robot_prim_path + "/chassis"
self._robot_wheels = ["left_wheel_joint", "right_wheel_joint"]
self._robot_wheels_speed = [9, 9]
self._wheelbase_Length = 0.56
self._wheel_radius = 0.085
set_stage_up_axis("z")
PhysicsContext(physics_dt=1.0 / 60.0)
create_prim(
prim_path="/background",
usd_path=self._asset_path + "/Environments/Grid/gridroom_curved.usd",
# position=np.array([0, 0, -9]),
position=np.array([-250, -300, -9]),
)
# setup high-level robot prim
self.prim = self._stage.DefinePrim(self._robot_prim_path, "Xform")
self.prim.GetReferences().AddReference(robot_usd)
def _on_stage_event(self, event):
self._stage = self._usd_context.get_stage()
if event.type == int(omni.usd.StageEventType.OPENED):
self._move_btn.enabled = self._setup_done
self._rotate_btn.enabled = self._setup_done
self._navigate_btn.enabled = self._setup_done
self._stop_btn.enabled = self._setup_done
self._stage_unit = UsdGeom.GetStageMetersPerUnit(self._stage)
if self._rc:
self._rc.enable_navigation(False)
self._setup_done = False
async def _play(self, task):
done, pending = await asyncio.wait({task})
if task in done:
self._timeline.play()
await asyncio.sleep(1)
async def _on_setup_fn(self, task):
done, pending = await asyncio.wait({task})
if task in done:
self._stage = self._usd_context.get_stage()
# setup robot controller
self._rc = RobotController(
self._stage,
# self._timeline,
self._dc,
self._robot_prim_path,
self._robot_chassis,
self._robot_wheels,
self._robot_wheels_speed,
[0.02, 0.05],
self._wheelbase_Length,
self._wheel_radius,
)
self._rc.control_setup()
# start stepping
self._editor_event_subscription = _physx.get_physx_interface().subscribe_physics_step_events(
self._rc.update
)
self._debug_draw_subs = (
omni.kit.app.get_app().get_update_event_stream().create_subscription_to_pop(self._rc.draw_path)
)
async def get_lidar_param(self):
await omni.kit.app.get_app().next_update_async()
self.lidarPath = "/robot/chassis/Lidar"
self._timeline.pause()
depth = self.lidarInterface.get_linear_depth_data(self.lidarPath)
zenith = self.lidarInterface.get_zenith_data(self.lidarPath)
azimuth = self.lidarInterface.get_azimuth_data(self.lidarPath)
print("depth", depth)
print("zenith", zenith)
print("azimuth", azimuth)
def _lidar_print(self):
self.timeline.play()
asyncio.ensure_future(self.get_lidar_param())
def _on_environment_setup(self):
# wait for new stage before creating robot
task = asyncio.ensure_future(omni.usd.get_context().new_stage_async())
task1 = asyncio.ensure_future(self._create_robot(task))
# set editor to play before setting up robot controller
task2 = asyncio.ensure_future(self._play(task1))
asyncio.ensure_future(self._on_setup_fn(task2))
# self._load_btn.enabled=False
self._move_btn.enabled = True
self._rotate_btn.enabled = True
self._navigate_btn.enabled = True
self._stop_btn.enabled = True
self._setup_done = True
def _on_move_fn(self):
print("Moving forward")
self._rc.control_command(9, 9)
def _on_rotate_fn(self):
print("Rotating in-place")
self._rc.control_command(3, -3)
def _on_navigate_fn(self):
goal_x = self.goal_coord[0].get_value_as_float() * self._stage_unit
goal_y = self.goal_coord[1].get_value_as_float() * self._stage_unit
goal_z = self.goal_coord[2].get_value_as_float()
max_speed = self._max_speed.get_value_as_float() * self._stage_unit
print("Navigating to goal ({}, {}, {})".format(goal_x, goal_y, goal_z))
sv = self._start_vel.get_value_as_float()
sa = self._start_acc.get_value_as_float()
gv = sv # self._goal_speed.get_value_as_float()
ga = sa # self._goal_acc.get_value_as_float()
self._rc.set_goal(goal_x, goal_y, math.radians(goal_z), sv, sa, gv, ga, max_speed)
self._rc.enable_navigation(True)
def _on_navigate_stop_fn(self):
print("Navigation Stopped")
self._rc.enable_navigation(False)
self._rc.control_command(0, 0)
def on_shutdown(self):
self._rc = None
self._timeline.stop()
self._editor_event_subscription = None
remove_menu_items(self._menu_items, "Isaac Examples")
self._window = None
gc.collect()