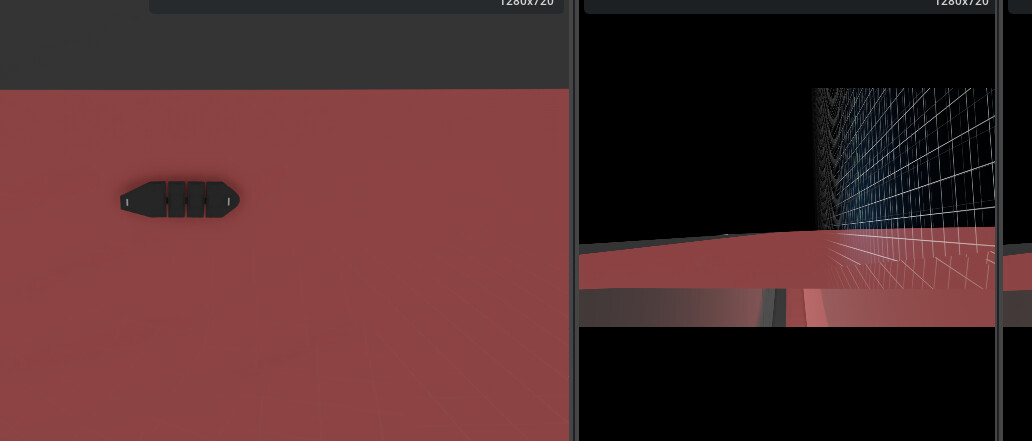
On the left hand side you can see the robot (which i had to hide due to business limitations), is on top of a cube with full physical properties. It has a camera tilted down.
On the right hand side, you can see that the camera is looking straight through the cube. Yielding a depth of ~2 meters for the bottom pixel.
@rthaker Not fixed! Not sure what is Nvidia’s workflow behind the scenes, but bugs will not fix themselves. In many of my open issues I was asked to check on latest version, and nothing was fixed.