I want to adapt imx230 camera on Jetson Nano platform L4T 32.7.2 system. Need to go to ISP and run with gstreamer command. I am using the imx219 device tree to modify the imx230 device tree.
However, currently gstnvarguscamerasrc keeps showing that no camera is available. Below is the command I executed.
it’s Jetson-IO to manage the DTB overlay file (i.e. *.dtbo) selection.
had you create the *.dtbo file and including with proper override information and a compatible string?
please see-also Adding Support for Custom Hardware for details.
thanks
Yes, all device tree files are modified by the equipment tree of IMX219.
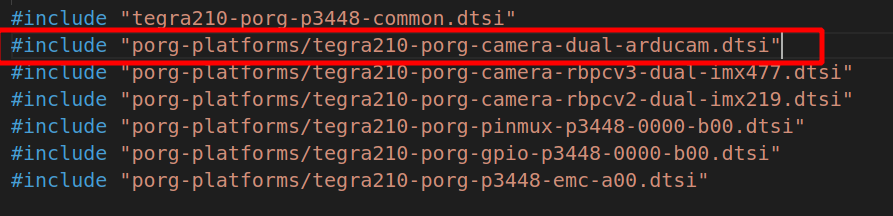
By observing different tree structures of L4T32.7.2 and L4T32.5.2, to achieve the function of Jetson-Io.py’s optional camera, “tegra210-p3448-all-p3449-0000-camera-imx219-dual.dts” The content of the file seems to be extracted from “tegra210-porg-plugin-manager.dtsi”.
Did I ignore something?
The following is my file content for Jetson-io.py to select the camera.
you should also have modify the configuration file for booting Linux (i.e. /boot/extlinux/extlinux.conf) after you created the device tree blob overlay. (i.e. *.dtbo)
please try create a new label in the extlinux.conf and adding FDT entry to specify the *.dtbo. you’ll need to choose different boot options for loading it.
jetson@ubuntu:~$ cat /boot/extlinux/extlinux.conf
TIMEOUT 30
DEFAULT JetsonIO
MENU TITLE L4T boot options
LABEL primary
MENU LABEL primary kernel
LINUX /boot/arducam/Image
INITRD /boot/initrd
APPEND ${cbootargs} quiet root=/dev/mmcblk0p1 rw rootwait rootfstype=ext4 console=ttyS0,115200n8 console=tty0 fbcon=map:0 net.ifnames=0
# When testing a custom kernel, it is recommended that you create a backup of
# the original kernel and add a new entry to this file so that the device can
# fallback to the original kernel. To do this:
#
# 1, Make a backup of the original kernel
# sudo cp /boot/Image /boot/Image.backup
#
# 2, Copy your custom kernel into /boot/Image
#
# 3, Uncomment below menu setting lines for the original kernel
#
# 4, Reboot
# LABEL backup
# MENU LABEL backup kernel
# LINUX /boot/Image.backup
# INITRD /boot/initrd
# APPEND ${cbootargs}
LABEL JetsonIO
MENU LABEL Custom Header Config: <CSI Camera Arducam Dual>
LINUX /boot/arducam/Image
FDT /boot/arducam/dts/tegra210-p3448-0000-p3449-0000-b00-user-custom.dtb
INITRD /boot/initrd
APPEND ${cbootargs} quiet root=/dev/mmcblk0p1 rw rootwait rootfstype=ext4 console=ttyS0,115200n8 console=tty0 fbcon=map:0 net.ifnames=0
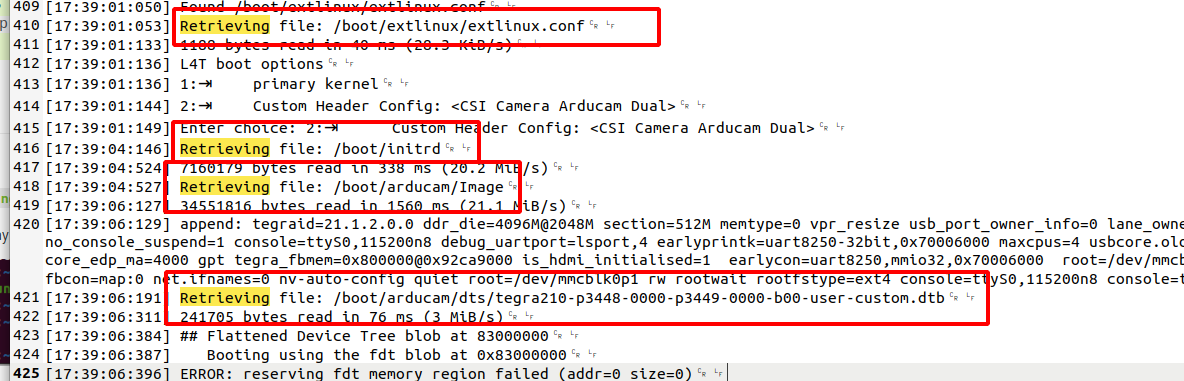
The device tree file used can be seen through dmesg.
we need to check whether the device tree blob overlay has been loaded correctly.
could you please setup serial console and gather the bootloader logs,
it should show the message… Retrieving file:/boot/xxx.dtb while loading the *.dtbo from the FDT entry,
thanks
the file should be *.dtbo for Jetson-IO tool to apply a DTB overlay file, and the *.dtbo file should put under /boot so that the Jetson‑IO tool can recognize it.
could you please check the sysnode, please check all the camera status settings.
for example, # cat /proc/device-tree/cam_i2cmux/i2c@0/rbpcv3_imx477_a@1a/status
let’s narrow down the issue,
is it only using Jetson-io.py to select the dtbo to cause the failure?
could you please enable Applications Using V4L2 IOCTL Directly to check the sensor functionality.
thanks
what’s the available sensor modes reported by v4l. could you please check $ v4l2-ctl -d /dev/video0 --list-formats-ext.
may I also know what’s the pixel clock you’ve configured, please check Sensor Pixel Clock to review the settings.
/ {
tcp: tegra-camera-platform {
compatible = "nvidia, tegra-camera-platform";
/**
* Physical settings to calculate max ISO BW
*
* num_csi_lanes = <>;
* Total number of CSI lanes when all cameras are active
*
* max_lane_speed = <>;
* Max lane speed in Kbit/s
*
* min_bits_per_pixel = <>;
* Min bits per pixel
*
* vi_peak_byte_per_pixel = <>;
* Max byte per pixel for the VI ISO case
*
* vi_bw_margin_pct = <>;
* Vi bandwidth margin in percentage
*
* max_pixel_rate = <>;
* Max pixel rate in Kpixel/s for the ISP ISO case
*
* isp_peak_byte_per_pixel = <>;
* Max byte per pixel for the ISP ISO case
*
* isp_bw_margin_pct = <>;
* Isp bandwidth margin in percentage
*/
num_csi_lanes = <4>;
max_lane_speed = <1500000>;
min_bits_per_pixel = <10>;
vi_peak_byte_per_pixel = <2>;
vi_bw_margin_pct = <25>;
max_pixel_rate = <240000>;
isp_peak_byte_per_pixel = <5>;
isp_bw_margin_pct = <25>;
/**
* The general guideline for naming badge_info contains 3 parts, and is as follows,
* The first part is the camera_board_id for the module; if the module is in a FFD
* platform, then use the platform name for this part.
* The second part contains the position of the module, ex. "rear" or "front".
* The third part contains the last 6 characters of a part number which is found
* in the module's specsheet from the vendor.
*/
modules {
cam_module0: module0 {
badge = "porg_front_RBPCV2";
position = "front";
orientation = "1";
cam_module0_drivernode0: drivernode0 {
pcl_id = "v4l2_sensor";
devname = "arducam-jvar 7-000c";
proc-device-tree = "/proc/device-tree/cam_i2cmux/i2c@0/arducam_a@0c";
};
cam_module0_drivernode1: drivernode1 {
pcl_id = "v4l2_lens";
proc-device-tree = "/proc/device-tree/lens_imx219@RBPCV2/";
};
};
cam_module1: module1 {
badge = "porg_rear_RBPCV2";
position = "rear";
orientation = "1";
cam_module1_drivernode0: drivernode0 {
pcl_id = "v4l2_sensor";
devname = "arducam-jvar 8-000c";
proc-device-tree = "/proc/device-tree/cam_i2cmux/i2c@1/arducam_e@0c";
};
cam_module1_drivernode1: drivernode1 {
pcl_id = "v4l2_lens";
proc-device-tree = "/proc/device-tree/lens_imx219@RBPCV2/";
};
};
};
};
};