Hi, I’m the beginner of IsaacSim, trying to build a custom robot; here is my USD file.
gripper_ROS.usd (3.0 MB)
I configured ActionGraph, referring this example: Migration Tutorial — Omniverse IsaacSim latest documentation
1. However, after pressing the start button, I only got three topics without /joint_states

2. I also tried to check if /joint_command works. In the terminal,
$ rostopic pub -r 50 /joint_command sensor_msgs/JointState “header:
seq: 0
stamp: {secs: 0, nsecs: 0}
frame_id: ‘’
name: [‘right_outer_knuckle_joint’]
position: [20]
velocity: [ ]
effort: [ ]”
But it does not make my gripper work.
3. I got warning when I connect Joint Names between ROS1 Subscribe Joint State and Articulation Controller
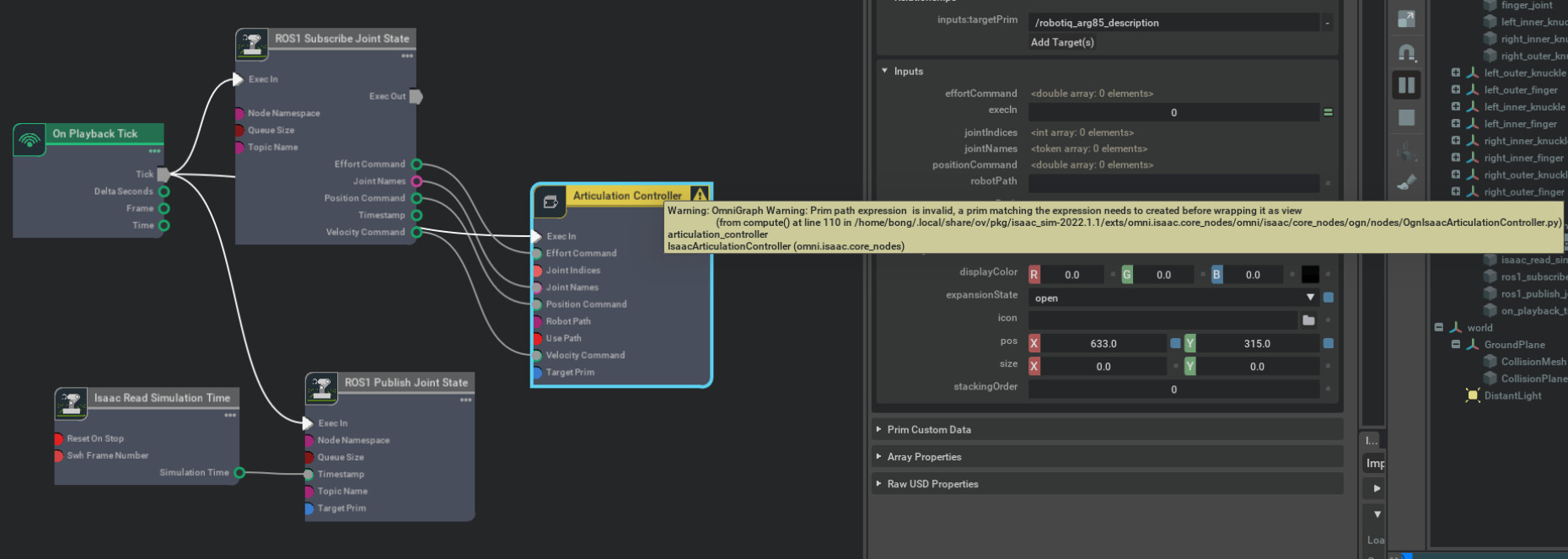
Warning: OmniGraph Warning: Prim path expression is invalid, a prim matching the expression needs to create before wrapping it as view
Q. What is the problem? Can you provide some advice that can fix the problems?
Thanks!
