Hey all,
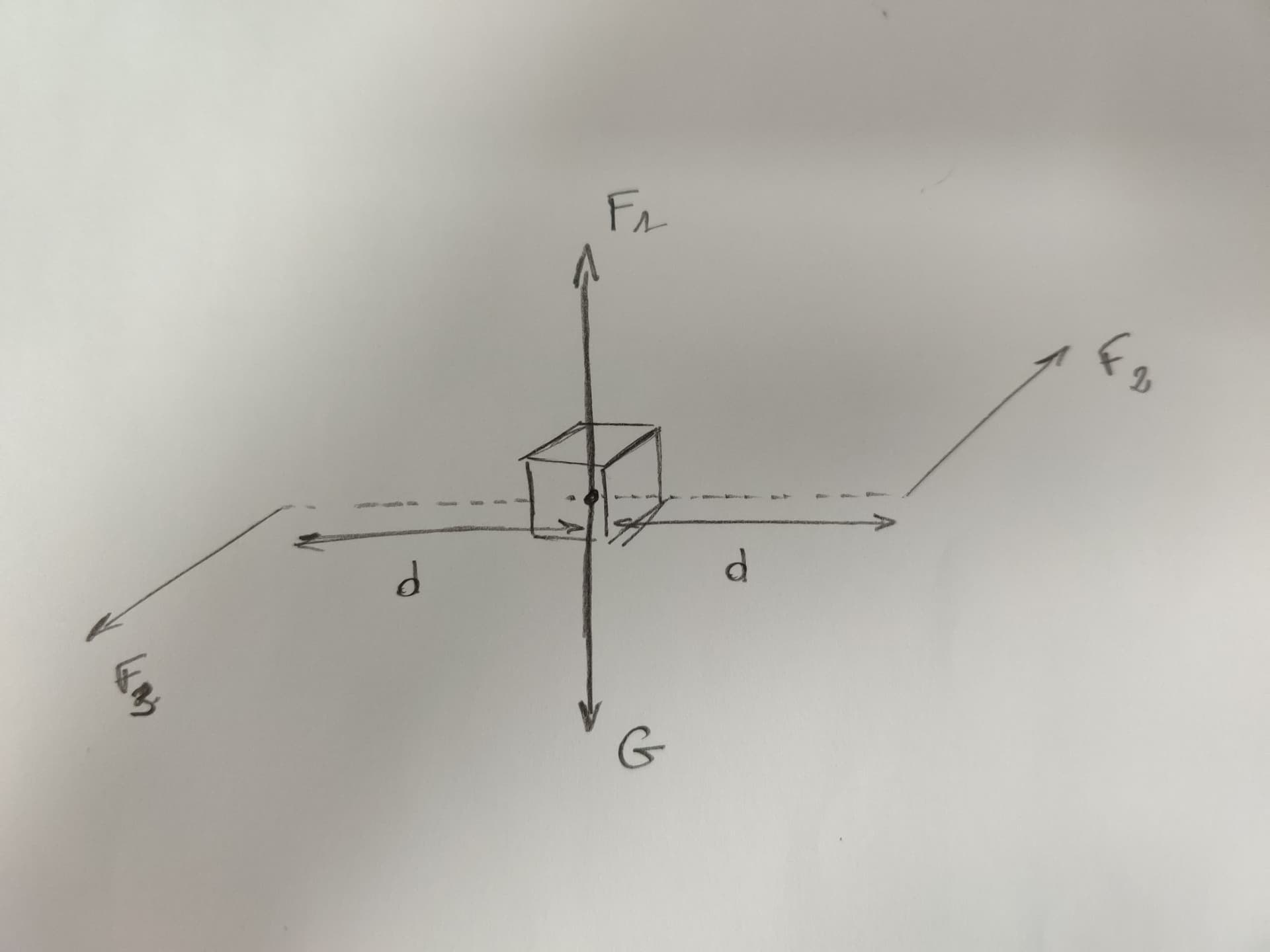
I am trying to implement boats in Isaac. To do so I need to apply torques to objects. However, as far as I am aware, Isaac does not offer any means to apply torques directly. Alternatively, one can apply torque to an object by applying a force at one meter from the Center of Mass of the object. Hence I tried to use the apply_body_force method from the dynamic control extension to apply torque to my objects. However, when I try to apply torques to some cubes nothing happens. It is as if the force where applied at the center of the object and not the desired coordinates. Is there something I am doing wrong?
Please find bellow the code we use to test this behavior.
Best,
Antoine
import os
import omni
import carb
from pxr import Gf
from omni.isaac.python_app import OmniKitHelper
CONFIG = {
"experience": f'{os.environ["EXP_PATH"]}/omni.isaac.sim.python.kit',
"renderer": "RayTracedLighting",
"headless": False,
}
if __name__ == "__main__":
omniverse_kit = OmniKitHelper(CONFIG)
ext_manager = omni.kit.app.get_app().get_extension_manager()
omniverse_kit.set_setting("/app/window/drawMouse", True)
omniverse_kit.set_setting("/app/livestream/proto", "ws")
ext_manager.set_extension_enabled_immediate("omni.physx.bundle", True)
ext_manager.set_extension_enabled_immediate("omni.syntheticdata", True)
ext_manager.set_extension_enabled_immediate("omni.kit.livestream.core", True)
ext_manager.set_extension_enabled_immediate("omni.kit.livestream.native", True)
import utils
from omni.isaac.dynamic_control import _dynamic_control
nucleus_server = utils.get_nucleus_server()
asset_path = nucleus_server + "/Isaac/Props/Blocks/nvidia_cube.usd"
stage = omni.usd.get_context().get_stage()
utils.setup_cpu_physics(stage, "/World/physicsScene")
utils.create_ground_plane(stage, "/World/ground_plane", size=100)
dc = _dynamic_control.acquire_dynamic_control_interface()
def physics_update(dt: float):
rigid_body = dc.get_rigid_body(prims[-1])
dc.apply_body_force(rigid_body, [0,0,981.1],[0,0,0])
dc.apply_body_force(rigid_body, carb._carb.Float3(1000,0,0),carb._carb.Float3(0,100,35))
dc.apply_body_force(rigid_body, carb._carb.Float3(-1000,0,0),carb._carb.Float3(0,-100,35))
physics_sub = omni.physx.acquire_physx_interface().subscribe_physics_step_events(physics_update)
prims = []
position = Gf.Vec3d(0, 0, 35)
prims = utils.createObject('/World/nvidia_cube',stage,asset_path,False,position=position, group=prims, density=1, scale=Gf.Vec3d(3,3,3))
omni.usd.get_context().save_as_stage(nucleus_server + "/Users/test/saved.usd", None)
while omniverse_kit.app.is_running():
omniverse_kit.update(1.0/30.0)
omniverse_kit.stop()
omniverse_kit.shutdown()
Here is our utils file
import omni
import carb
from numpy import sin, cos
from pxr import UsdGeom, Gf, Sdf, UsdPhysics, UsdShade
from omni.isaac.utils.scripts.nucleus_utils import find_nucleus_server
from omni.physx.scripts import utils
def CreateBasicMaterial(stage):
mtl_created_list = []
omni.kit.commands.execute(
"CreateAndBindMdlMaterialFromLibrary",
mdl_name="OmniPBR.mdl",
mtl_name="OmniPBR",
mtl_created_list=mtl_created_list,
)
mtl_prim = stage.GetPrimAtPath(mtl_created_list[0])
material = UsdShade.Material(mtl_prim)
return material
def Euler2Quat(ypr):
cypr = cos(ypr*0.5); sypr = sin(ypr*0.5)
qw = cypr[0]*cypr[1]*cypr[1] + sypr[0]*sypr[1]*sypr[2]
qx = sypr[0]*cypr[1]*cypr[1] - cypr[0]*sypr[1]*sypr[2]
qy = cypr[0]*sypr[1]*cypr[1] + sypr[0]*cypr[1]*sypr[2]
qz = cypr[0]*cypr[1]*sypr[1] - sypr[0]*sypr[1]*cypr[2]
return Gf.Quaternion(qw, Gf.Vec3d(qx,qy,qz))
def createObject(prefix, stage, path, material, position=Gf.Vec3d(0, 0, 0), rotation=Gf.Quaternion(1, Gf.Vec3d(0,0,0)), group=[], allow_physics=True, density=1000, scale=Gf.Vec3d(1.0,1.0,1.0), is_instance=False):
"""! Creates a 3D object from a USD file and adds it to the stage
@type prefix: str
@param prefix: The name of the object in the world (does not have to be unique).
@type stage: pxr.UsdStage
@param stage: The name of the stage the objects belong to.
@type path: str
@param path: The path of to the USD file on the docker/drive.
@type position: pxr.Gf.Vec3d
@param position: The position of the object relatively to the stage.
@type rotation: pxr.Gf.Quaternion
@param rotation: The rotation of the object relatively to the stage.
@type group: list
@param group: The group of primitives this object belongs to.
@type allow_physics: bool
@param allow_physics: Allows physics if set to True.
@type density: float
@param density: The density of the object
@type scale: pxr.Gf.Vec3d
@param scale: The scale of the object in X,Y, and Z.
@rtype: list
@return: The group of primitives this object belongs to.
"""
prim_path = omni.usd.get_stage_next_free_path(stage, prefix, False)
group.append(prim_path)
obj_prim = stage.DefinePrim(prim_path, "Xform")
obj_prim.GetReferences().AddReference(path)
if is_instance:
obj_prim.SetInstanceable(True)
xform = UsdGeom.Xformable(obj_prim)
xform = setScale(xform, scale)
xform = setTransform(xform, rotation, position)
if material:
UsdShade.MaterialBindingAPI(obj_prim).Bind(material, UsdShade.Tokens.strongerThanDescendants)
if allow_physics:
utils.setRigidBody(obj_prim, "convexHull", False)
mass_api = UsdPhysics.MassAPI.Apply(obj_prim)
mass_api.CreateMassAttr(density)
return group
def setScale(xform, scale):
"""! Set the scale of an object
@type xform: pxr.UsdGeomXform
@param xform: the Xform related to the object.
@type scale: pxr.Gf.Vec3d
@param scale: The scaling factor to be applied onto the object.
@rtype: pxr.UsdGeomXform
@return: the Xform related to the object.
"""
scale_op = None
for xformOp in xform.GetOrderedXformOps():
if xformOp.GetOpType() == UsdGeom.XformOp.TypeScale:
scale_op = xformOp
if scale_op:
xform_op = scale_op
else:
xform_op = xform.AddXformOp(UsdGeom.XformOp.TypeScale, UsdGeom.XformOp.PrecisionDouble, "")
xform_op.Set(scale)
return xform
def setTranslate(xform, translation):
"""! Translates an object
@type xform: pxr.UsdGeomXform
@param xform: the Xform related to the object.
@type translation: pxr.Gf.Vec3d
@param translation: The translation to be applied onto the object.
@rtype: pxr.UsdGeomXform
@return: the Xform related to the object.
"""
translate_op = None
for xformOp in xform.GetOrderedXformOps():
if xformOp.GetOpType() == UsdGeom.XformOp.TypeTranslate:
translate_op = xformOp
if translate_op:
xform_op = translate_op
else:
xform_op = xform.AddXformOp(UsdGeom.XformOp.TypeTranslate, UsdGeom.XformOp.PrecisionDouble, "")
xform_op.Set(translation)
return xform
def setRotateXYZ(xform, rotation):
"""! Rotates an object using the XYZ convention
@type xform: pxr.UsdGeomXform
@param xform: the Xform related to the object.
@type rotation: pxr.Gf.Vec3d
@param rotation: The rotation to be applied onto the object.
@rtype: pxr.UsdGeomXform
@return: the Xform related to the object.
"""
rotation_op = None
for xformOp in xform.GetOrderedXformOps():
if xformOp.GetOpType() == UsdGeom.XformOp.TypeRotationXYZ:
rotation_op = xformOp
if rotation_op:
xform_op = rotation_op
else:
xform_op = xform.AddXformOp(UsdGeom.XformOp.TypeRotationXYZ, UsdGeom.XformOp.PrecisionDouble, "")
xform_op.Set(rotation)
return xform
def setTransform(xform, rotation, position):
"""! Applies a transformation matrix onto an object
@type xform: pxr.UsdGeomXform
@param xform: the Xform related to the object.
@type rotation: pxr.Gf.Quaternion
@param rotation: The rotation to be applied onto the object.
@type position: pxr.Gf.Vec3d
@param position: The rotation to be applied onto the object.
@rtype: pxr.UsdGeomXform
@return: the Xform related to the object.
"""
mat = Gf.Matrix4d().SetTranslate(position)
mat.SetRotateOnly(Gf.Rotation(rotation))
transform_op = None
for xformOp in xform.GetOrderedXformOps():
if xformOp.GetOpType() == UsdGeom.XformOp.TypeTransform:
transform_op = xformOp
if transform_op:
xform_op = transform_op
else:
xform_op = xform.AddXformOp(UsdGeom.XformOp.TypeTransform, UsdGeom.XformOp.PrecisionDouble, "")
xform_op.Set(mat)
return xform
def create_ground_plane(stage, plane_name, size=10, up_direction="Z", location=Gf.Vec3f(0,0,0), unknown=Gf.Vec3f(1.0), visible=True):
from pxr import PhysicsSchemaTools, PhysxSchema
"""
Creates a ground plane.
Inputs:
stage: The name of the world the objects belong to.
plane_name: The name of the ground plane.
size: The size of the ground plane in meters.
up_direction: The direction normal to the plane.
location: The position of the plane.
unknown: An unknown parameter.
visible: Should the ground plane be visible.
"""
PhysicsSchemaTools.addGroundPlane(stage, plane_name, up_direction, size*10, location, unknown)
if not visible:
imageable = UsdGeom.Imageable(stage.GetPrimAtPath(plane_name))
if imageable:
imageable.MakeInvisible()
def setup_cpu_physics(stage, physics_name, gravity=9.81, gravity_direction=Gf.Vec3f(0.0, 0.0, -1.0)):
from pxr import PhysicsSchemaTools, PhysxSchema
# Add physics scene
scene = UsdPhysics.Scene.Define(stage, Sdf.Path(physics_name))
# Set gravity vector
scene.CreateGravityDirectionAttr().Set(gravity_direction)
scene.CreateGravityMagnitudeAttr().Set(gravity*100)
# Set physics scene to use cpu physics
PhysxSchema.PhysxSceneAPI.Apply(stage.GetPrimAtPath(physics_name))
physxSceneAPI = PhysxSchema.PhysxSceneAPI.Get(stage,physics_name)
physxSceneAPI.CreateEnableCCDAttr(True)
physxSceneAPI.CreateEnableStabilizationAttr(True)
physxSceneAPI.CreateEnableGPUDynamicsAttr(False)
physxSceneAPI.CreateBroadphaseTypeAttr("MBP")
physxSceneAPI.CreateSolverTypeAttr("TGS")
def get_nucleus_server():
result, nucleus_server = find_nucleus_server()
if result is False:
carb.log_error(
"Could not find nucleus server. Stopping."
)
exit(1)
return nucleus_server