I want to run my custom robot in isaac sim and the robot has been imported from a URDF file. However, some properties in URDF are not imported.
<joint name="joint" type="continuous">
<axis xyz="0 -1 0"/>
<origin rpy="0.0 0.0 0.0" xyz="0.0 -0.076 0.00"/>
<parent link="link1"/>
<child link="link2"/>
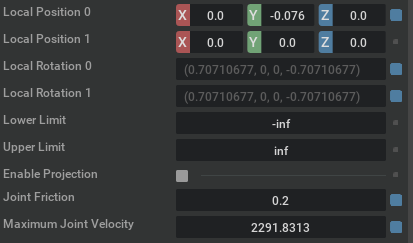
<limit lower="-0" upper="3.1" effort="18" velocity="40" />
<dynamics damping="0.01" friction="0.2"/>
</joint>
The upper, lower limit and max velocity are not imported properly.