Hi.
I am trying to control my IsaacSim manipulation (Doosan M1013) uisng ROS moveit.
I’ve got a problem with the gap between the joint values calculated from ROS moveit and them subscribed in IsaacSim.
In my case, the target position (x,y,z,rx,ry,rz,w) in Sim is published to ROS Moveit node, and Moveit calculate the interpolation joint anlges.
Then, the joint angles are published to Sim, and Sim_subscriber subscribes them as below omni graph. (Sim 2022.2.0 ver.)

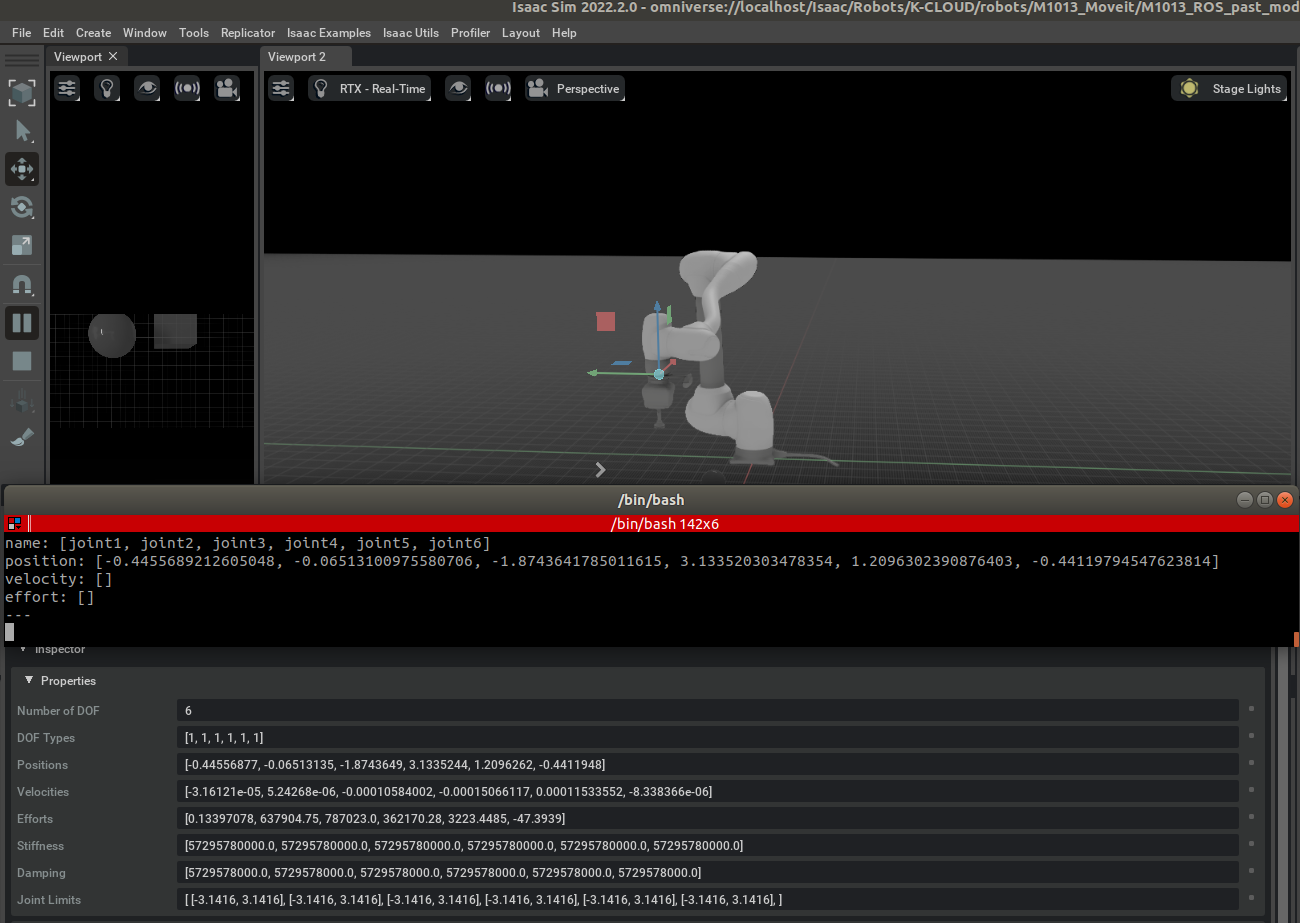
I recognized that the published topic and received values are different, and these cause the gap the btw the target position and the real position for the end-effector.
How could I modify this problem ?
Thank you.