I am trying to reproduce the example in this link.
I installed VINS-Fusion for Ubuntu 20.04. I am using ROS Noetic.
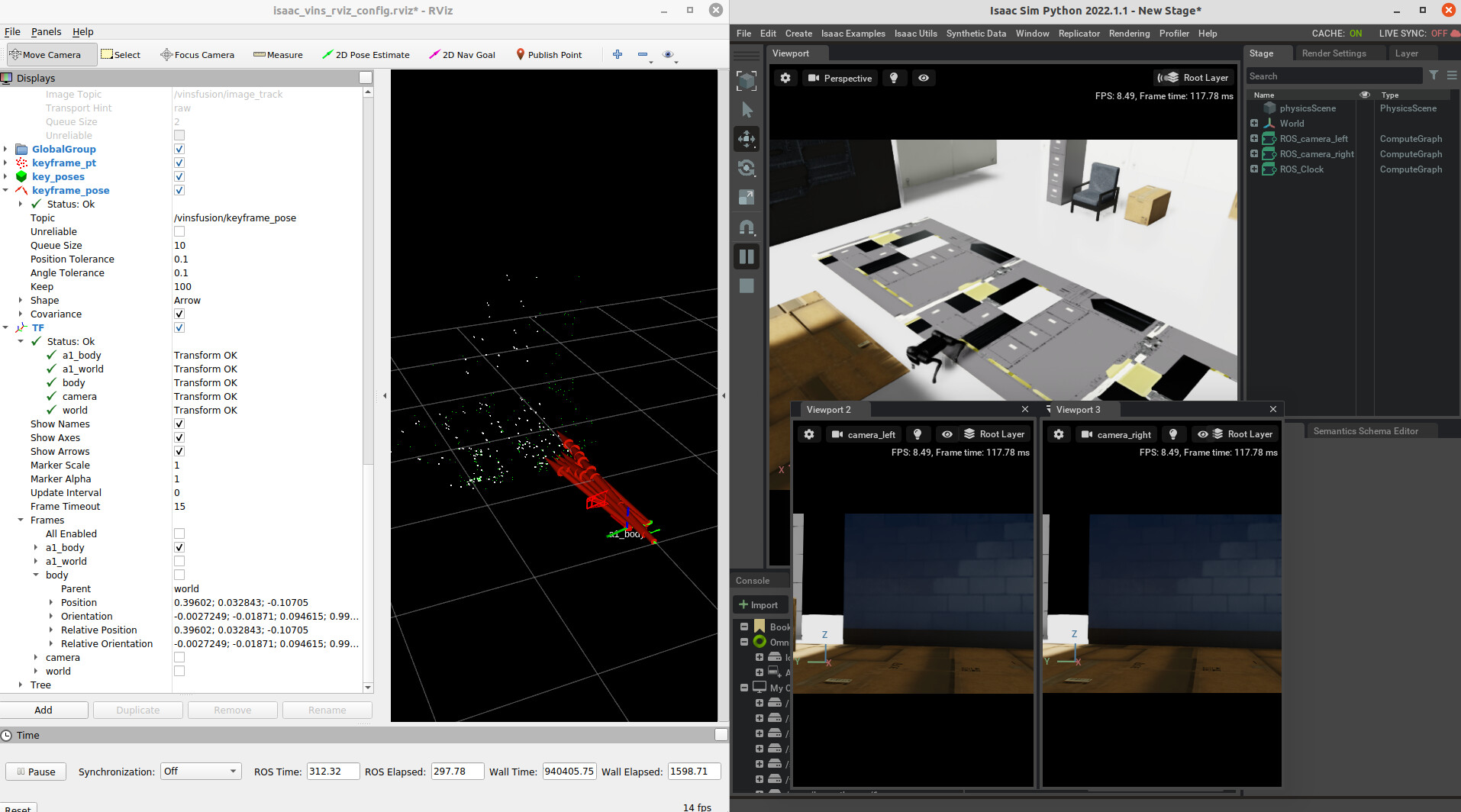
When I run the simulation, all the topics are being published as expected and I can see the point cloud and images in RVIZ.
topics published:
/camera_left/camera_info
/camera_right/camera_info
/clicked_point
/clock
/feature_tracker/feature
/globalEstimator/car_model
/globalEstimator/global_path
/initialpose
/isaac_a1/camera_forward/camera_left/rgb
/isaac_a1/camera_forward/camera_right/rgb
/isaac_a1/foot_force
/isaac_a1/imu_data
/loop_fusion/camera_pose_visual
/loop_fusion/pose_graph
/loop_fusion/pose_graph_path
/move_base_simple/goal
/rosout
/rosout_agg
/tf
/tf_static
/vins_cam_switch
/vins_imu_switch
/vins_restart
/vinsfusion
/vinsfusion/camera_pose
/vinsfusion/camera_pose_visual
/vinsfusion/extrinsic
/vinsfusion/image_track
/vinsfusion/imu_propagate
/vinsfusion/key_poses
/vinsfusion/key_poses_array
/vinsfusion/keyframe_point
/vinsfusion/keyframe_pose
/vinsfusion/margin_cloud
/vinsfusion/odometry
/vinsfusion/path
/vinsfusion/point_cloud
I tried to use the tool 2D Nav Goal and Published Point in RVIZ, but the robot can’t move in Isaac Sim.
I also tried to manually publish into the topics /move_base_simple/goal and /clicked_point but nothing happens.