Hi all,
I’m trying to figure out ROS topic communication between the ISAAC SIM and ISAAC ROS package on the Tutorial for ESS with Isaac Sim.
I have successfully completed the isaac_ros_ess section from this link. However, when I start the simulation on the ISAAC SIM (Isaac Examples → ROS → Isaac Ros → Sample Scene), I see the following topic list:
/clock
/cmd_vel
/front_3d_lidar/point_cloud
/front_stereo_camera/imu/data
/front_stereo_camera/left_rgb/camerainfo
/front_stereo_camera/left_rgb/image_raw
/front_stereo_camera/right_rgb/camerainfo
/front_stereo_camera/right_rgb/image_raw
/left_stereo_camera/imu/data
/odom
/parameter_events
/rear_stereo_camera/imu/data
/right_stereo_camera/imu/data
/rosout
/tf
But when I run the ros2 launch isaac_ros_ess isaac_ros_ess_isaac_sim.launch.py engine_file_path:=${ISAAC_ROS_WS:?}/isaac_ros_assets/models/dnn_stereo_disparity/dnn_stereo_disparity_v4.0.0/ess.engine threshold:=0.35 command inside ISAAC ROS container, Rviz screen shows different topic names and doesn’t even show any result on the grid:

So I looked into it and found that Rviz tries to listen to topics called /points2, /front_stereo_camera/left/image_resize, and /front_stereo_camera/right/image_resize. None of these are published by the ISAAC SIM.
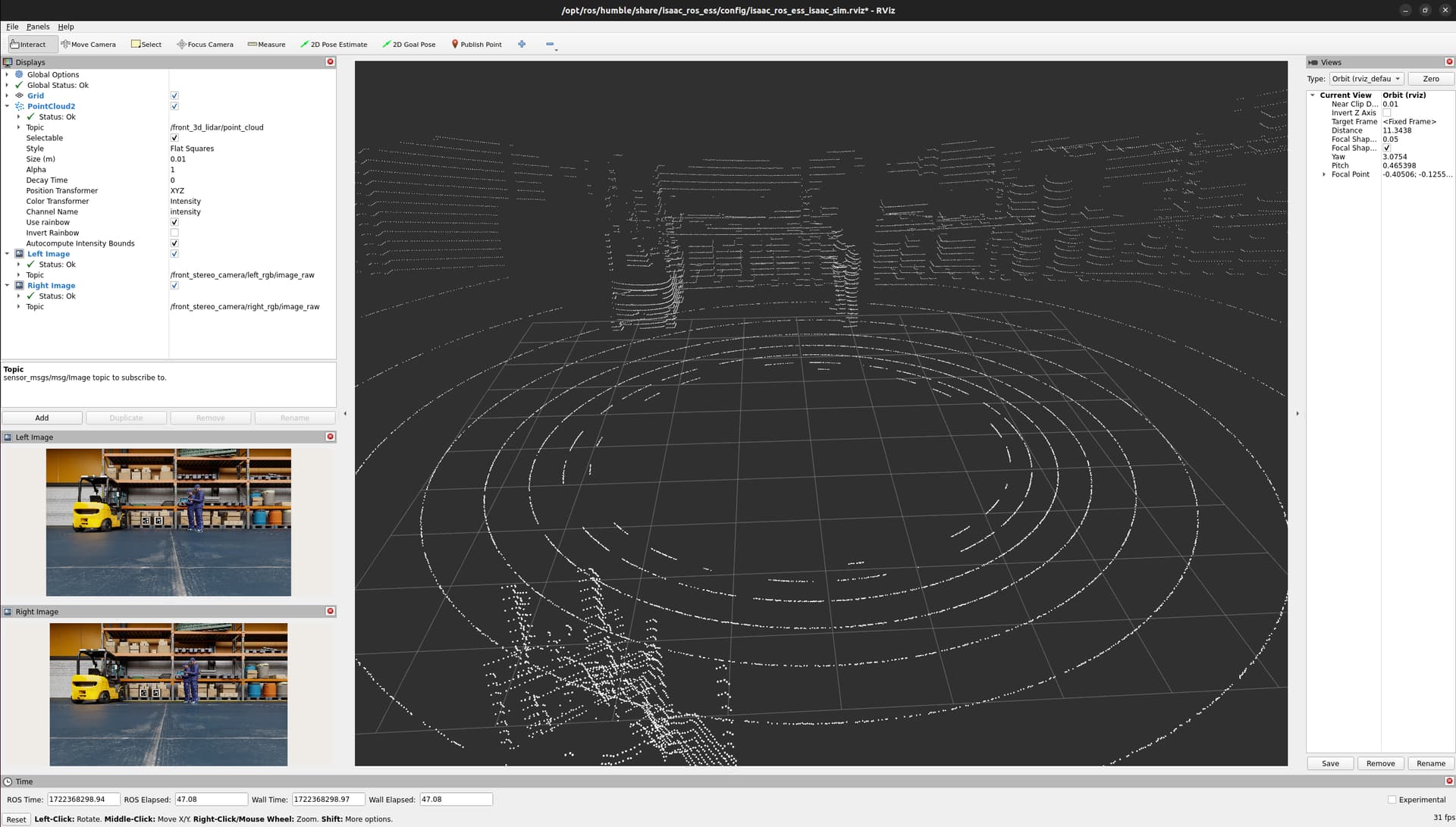
I also changed the default topic names in Rviz to the ones that are actually published by the ISAAC SIM as follows: /front_3d_lidar/point_cloud, /front_stereo_camera/left_rgb/image_raw, and /front_stereo_camera/right_rgb/image_raw. After these changes, I see the output on the Rviz in real time (see the first answer for the image).
Why doesn’t it show the output as demonstrated in the documentation? (as the following picture):
{kind=link}