Hello, I imported a hand from Onshape into isaac sim and was messing around with it and noticed that the fingers are phasing into each other and not colliding. Online I saw that I need to do a convex decomposition, I was wondering if anyone could help me with adding collision physics to the model I am working with.
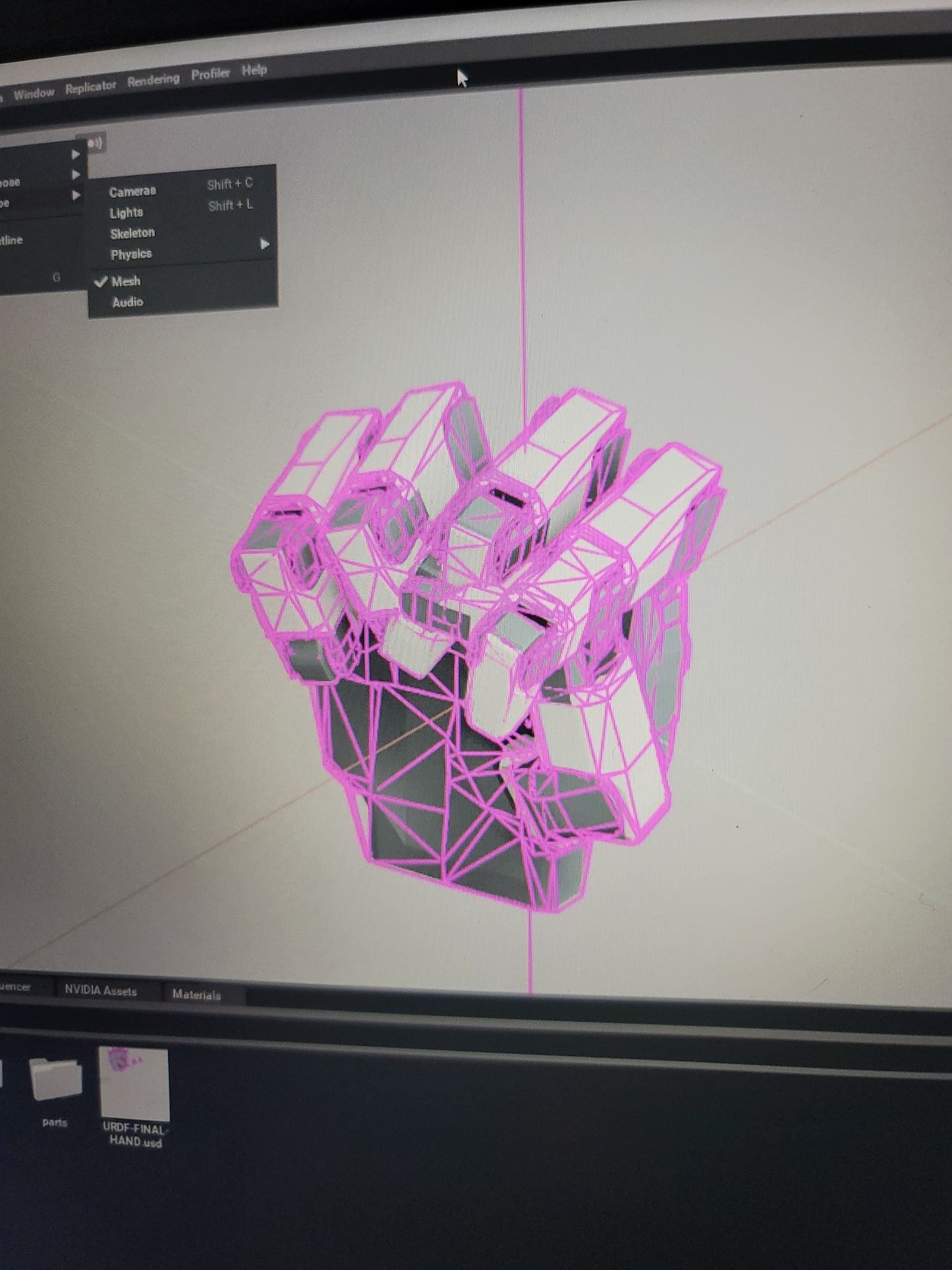
I used the convex decomposition that was mentioned in the second link but even after adding the colliders the fingers are still phasing into each other. I have added photos for reference. Also I had the maximum number of convex hulls set to 32 for each digit of the hand.