Please provide the following info (check/uncheck the boxes after creating this topic):
Software Version
DRIVE OS Linux 5.2.6
DRIVE OS Linux 5.2.6 and DriveWorks 4.0
DRIVE OS Linux 5.2.0
DRIVE OS Linux 5.2.0 and DriveWorks 3.5
NVIDIA DRIVE™ Software 10.0 (Linux)
NVIDIA DRIVE™ Software 9.0 (Linux)
other DRIVE OS version
other
Target Operating System
Linux
QNX
other
Hardware Platform
NVIDIA DRIVE™ AGX Xavier DevKit (E3550)
NVIDIA DRIVE™ AGX Pegasus DevKit (E3550)
other
SDK Manager Version
1.9.1.10844
other
Host Machine Version
native Ubuntu 18.04
other
Hi everyone,
We are currently in the process of designing/installing the electrical interface for our Nvidia.
We had a couple of questions pertaining to the peculiarities of the AGX Pegasus 2x dGPU (TU100) system. Please let me know if the post should be split up into multiple posts.
I have included some relevant forum posts and documents that I have tried to comprehend to the best of my ability prior to posting:
a) DRIVE AGX Xavier vehicle installation and wiring
b) What is the nominal current of AGX
c) Power consumption estimations & hardware (regulator) recommendations
d) NVIDIA DRIVE Documentation | NVIDIA Developer
e) DRIVE AGX: Out of specification power input may damage the system
f) DRIVE AGX: Wait time required between system power cycles
g) Power requirements Pegasus with dGPU
-
Is it safe to say that there is NO COM Express modules installed on the E3550 Unit with PN# 940-63550-2200-100? Therefore, is there no need for an isolated power supply? (Such as the CALEX solution discussed in the documentation.
-
Provided we are currently using a DriveWorks OS Linux 5.2.6 and Driveworks 4.0, are the protections for low voltage discussed in FAQ (e) in place within Driveworks 4.0 as well as Driveworks software 9.0.? If not what kind of active low voltage protection do you recommend?
-
For the sensor suite that uses Fakra (Cameras etc) we intend to extend the provided cables. It is our understanding that it is imperative to match the impedance of interconnections. Do you know of any panel mount options that are male-female? Or is it preferable to use male-female extension cables rather than cable-panelmount-cable.
-
Nvidia no longer sells the ED3579 (Dual GbE Dongle) ethernet adapter. It is our understanding that sensors should be attached to the Fakra connectors, and ideally not all on the same ethernet port. Is it OK to put a multitude of sensors (Inertial GPS, LiDars (x3), Radar etc) on a single ED3579 as long as the data rate is below the port maximum? Or are there any replacements for the ED3579 available should sensors have their own ethernet ports?
-
For the electrical integration, is the following simplified setup acceptable?
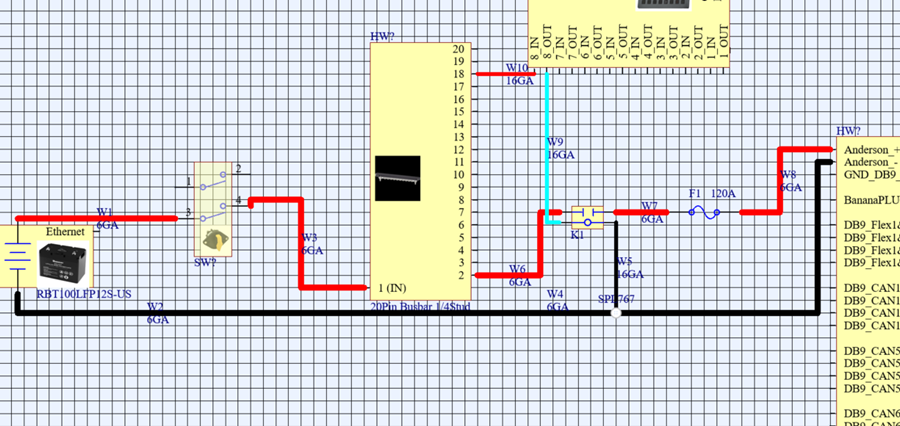
Battery->Master Inline Switch->Busbar->Relay (Connected to switch on/off Nvidia Power)->120ABreaker->Nvidia Anderson Connector.
- While running some basic computations our Nvidia seems to pull approximately 20Amps. The EDP in the documentation is stated as being 95A. Can the EDP value be assumed to be an average current draw, or is it more of a maximum limit?
Our usage does not have a large alternator, therefore, to properly size our battery capacity for a day of testing I need to estimate the average current draw. Example: with 3 Lidars, 4 cameras and a radar can one expect to pull around 50A? Or is 95A truly the average current draw?


 )
)