Hi Isaac Simer, currently I’m using ‘ros2 topic pub’ to control the robot arm and gripper. But I found that unreasonable joint value setting will cause two links to cross each other as shown below.

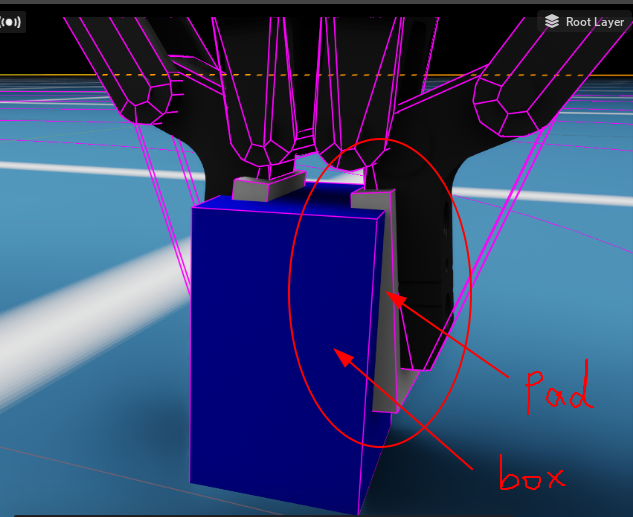
While in the robot_party example, both the dofbot and franka grippers will stop closing after contact with the cube. My question is how can I achieve the same result for the other grippers (e.g., robotiq_2f_85) in ROS, that is, the gripper can grasp the objects successfully but not cross with the object.