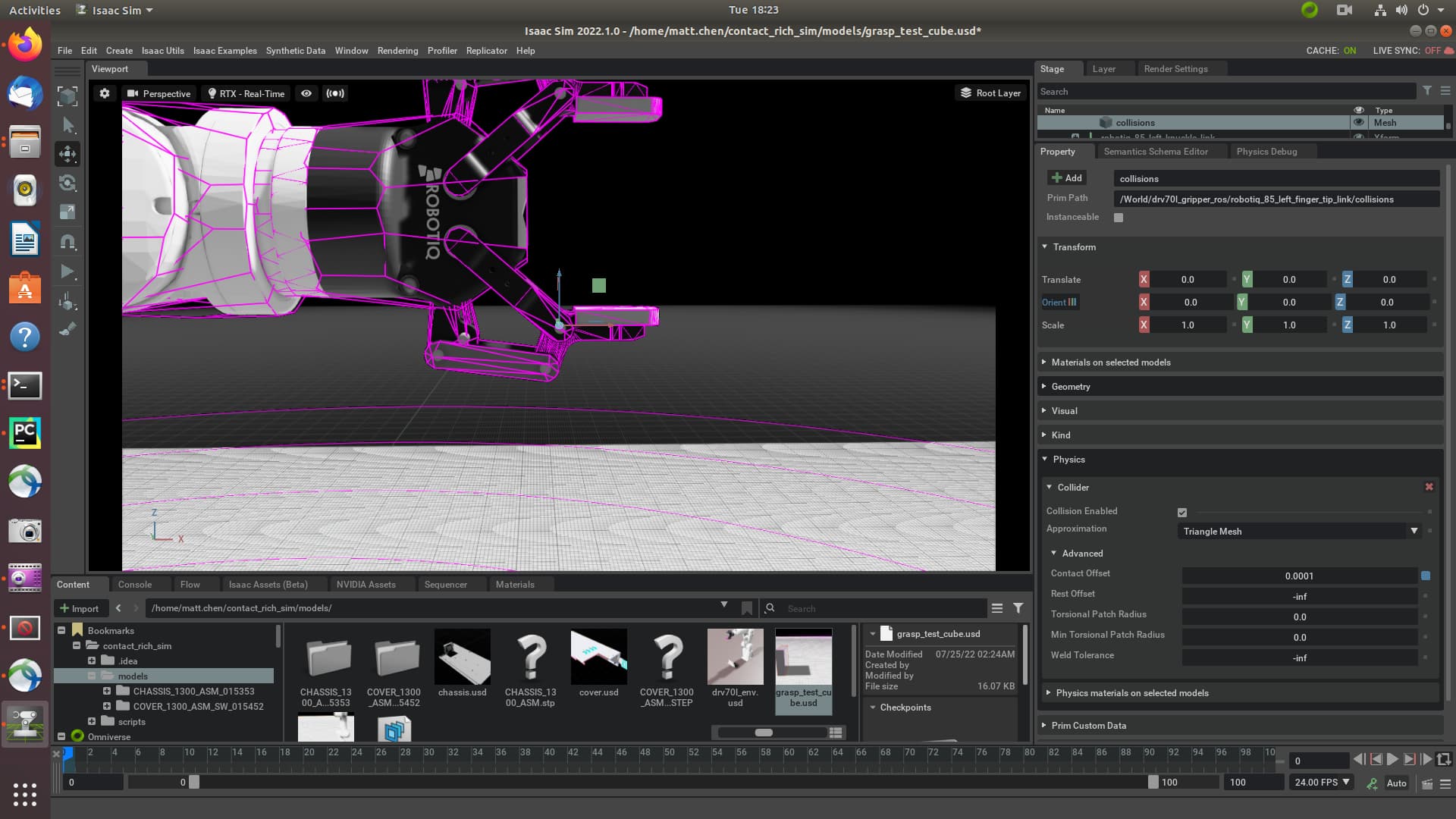
Hi, I imported a robot arm with gripper and tried to grasp a cube.
But I found that it’s unstable (jitter and unstable collision detection) when grasping it as shown in this video:
By the way, how to set a proper value for gripper’s joint to grasp an object?
I found that I can’t just totally close the gripper to grasp the cube. I need to choose the joint value carefully that gripper’s width is close to cube’s width
@rthaker No, I was not. I tried a lot of strategies to implement a peg transfer task. However, when the robot grasps the object and transfers the block, the object falls down from the end effector. I tried different meshes and different materials with high friction, but it did not work.
Do you have some tips for grasping tasks?
Hi. By some coincidence, I have modeled this gripper for some other task and I can check if I can share the finalized model, or include in our assets library.
This gripper is particularly tricky because it contains kinematic loops in it, so there’s some extra settings to do.
If I can’t share the entire model, I’ll write up what I’ve made here so that it works properly.
Hi, I have the same problem and would love if you could share the model or a detailed guide on how to solve it. As far as I’ve seen, there are several similar questions and it’s a very common problem.
Hi. I had a similar problem and my workaround was to create a Surface Gripper in the tip of the gripper. When you close the actual gripper, the surface gripper activates and rigidly attach the object to the robot. This could also be achieved creating a fixed joint programatically.
It might not work for some use cases when you need to physically simulate the force of the gripper, but it’s a simple way to attach an object that you don’t want to drop.