The OptiX 7 advanced examples have been updated with two new examples (as explained inside the README.md there).
rtigo9 is similar to nvlink_shared, but optimized for single-GPU as well to not do the compositing step unless multiple GPUs are used. The main difference is that it shows how to implement more light types.
It’s supporting the following light types:
-
Constant environment light: Uniformly sampled, constant HDR color built from emission color and multiplier.
-
Spherical environment map light: Importance sampled area light. Now supporting arbitrary orientations of the enviroment via a rotation matrix. Also supporting low dynamic range textures scaled by the emission multiplier (as in all light types).
-
Point light: Singular light type with or without colored omnidirectional projection texture.
-
Spot light: Singular light type with cone spread angle in range [0, 180] degrees (hemisphere) and falloff (exponent on a cosine), with or without colored projection texture limited to the sphere cap described by the cone angle.
-
IES light: Singular light type (point light) with omnidirectional emission distribution defined by an IES light profile file which gets converted to a float texture on load. With or without additional colored projection texture.
-
Rectangular light: Area light with constant color or importance sampled emission texture. Also supports a cutout opacity texture.
-
Arbitrary triangle mesh light: Uniformly sampled light geometry, with or without emission texture. Also supports a cutout opacity texture.
To be able to define scenes with these different light types, this example’s scene description file format has been enhanced. The camera settings as well as the tonemapper settings defined inside the system description file now can be overridden inside the scene description. The previous hardcoded light definitions inside the system description file have been removed and the scene description has been changed to allow light material definitions and creation of specific light types with these emissive materials, resp. assigning them to arbitrary triangle meshes.
Please read the system_rtigo9_demo.txt and scene_rtigo9_demo.txt files which explain the creation of all supported light types inside a single scene.
Also the previous compile time switch inside the config.h file to enable or disable direct lighting (“next event estimation”) has been converted to a runtime switch which can be toggled inside the GUI. Note that all singular light types do not work without direct lighting enabled because they do not exist as geometry inside the scene and cannot be hit implicitly. (The probability for that is zero. Such lights do not exist in the physical world.)
Additionally to CUDA peer-to-peer data sharing via NVLINK, the rtigo9 example also allows that via PCI-E, but this is absolutely not recommended for geometry for performance reasons. Please read the explanation of the peerToPeer option inside the system description.
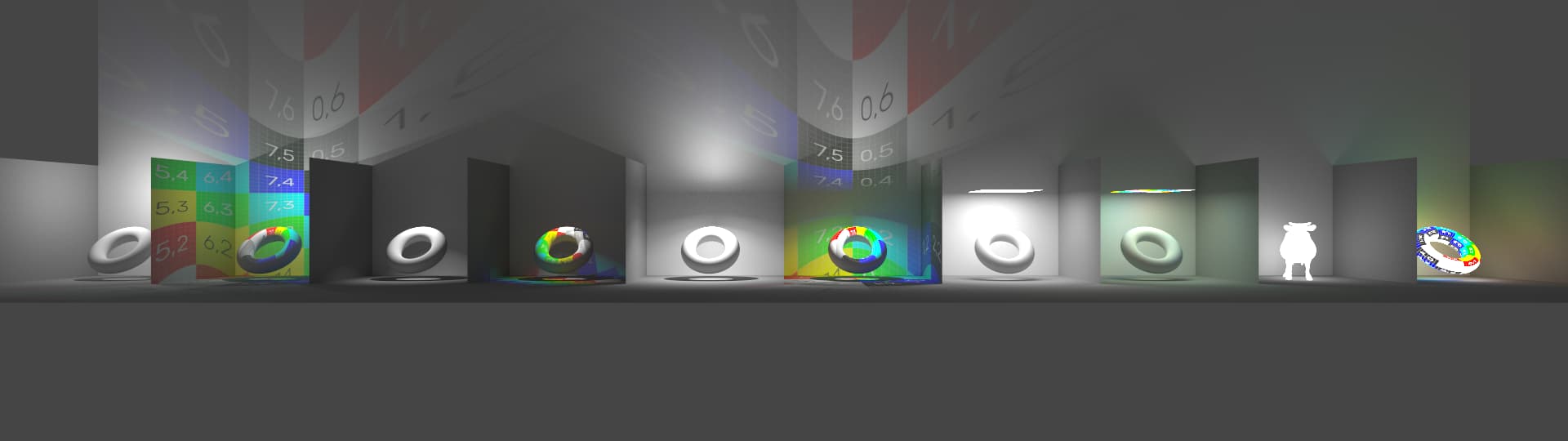
rtigo9_demo.png
Light types shown in the image above: The grey background is from a constant environment light.
Then from left to right: point light, point light with projection texture, spot light with cone angle and falloff, spot light with projection texture, IES light, IES light with projection texture, rectangle area light, rectangle area light with importance sampled emission texture, arbitrary mesh light (cow), arbitrary mesh light with emission texture.
rtigo10 is meant to show how to architect a renderer for maximum performance with the fastest possible shadow/visibility ray type implementation and the smallest possible shader binding table layout.
It’s based on rtigo9 and supports the same system and scene description file format but removed support for cutout opacity and surface materials on emissive area light geometry (arbitrary mesh lights). The renderer architecture implements all materials as individual closesthit programs instead of a single closesthit program and direct callable programs per material as in all previous examples above. Lens shaders and the explicit light sampling is still done with direct callable programs per light type for optimal code size.
To reduce the shader binding table size, where the previous examples used a hit record entry per instance with additional data for the geometry vertex attribute data and index data defining the mesh topology plus material and light IDs, the shader binding table in rtigo10 holds only one hit record per material shader which is selected via the instance sbtOffset field. All other data is indexed with via the user defined instanceId field.
On top of that, by not supporting cutout opacity there is no need for anyhit programs in the whole pipeline. The shadow/visibility test ray type is implemented with just a miss shader, which also means there is no need to store hit records for the shadow ray type inside the shader binding table at all.















{kind=link}
{kind=link}