I want to get the camera topic of fixed fps ( 30 ) when i publish the camera topic(/carter1/rgb_left, /carter1/rgb_right) using ros2.
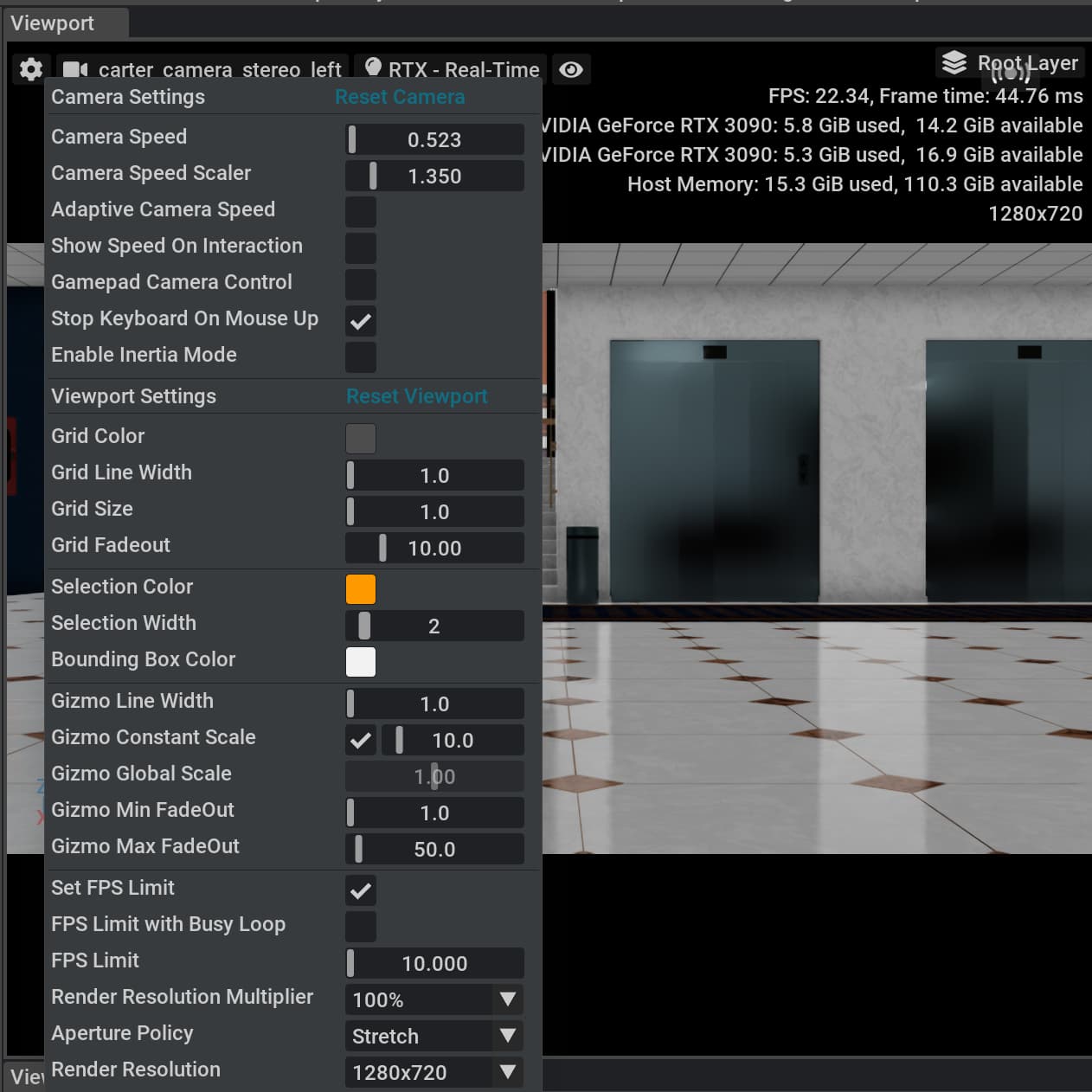
- At first, I set the “FPS Limit” ( =10 _ just test ) But like below figure, It does not apply.
( In figure, FPS Limit is 10, but camera fps published is 22.34 )
And then, What should i do if i want to get the fixed fps of camera topic using ros2 in isaac sim?
Now I am using the omnigraph for getting the ros topics ( camera, imu, lidar etc ).
And also when the scene is more complicated or I open multiple viewport, FPS decreased.
-
Second, I found the RTX Option(real time & interactive & accurate ), What is differences between them? When i choose “Interactive option” like below, scene looks like blurry and dark. ( But real-time looks good )
-
Is it possible to get the topic of fixed fps if i use the Enterprise version?
-
Lastly, I want to publish various sensor topic ( imu, camera, lidar ). In this case, Can i get it at a fixed fps for each topic? ( like camera = 30 fps, IMU = 110hz )

Thank you so much for reading. If anyone knows, Please reply me… !!
Thank you