Hi,
I tried to control my robot through ROS.
My OS is Windows 10, in the following video I added ROS2 components to the action graph.
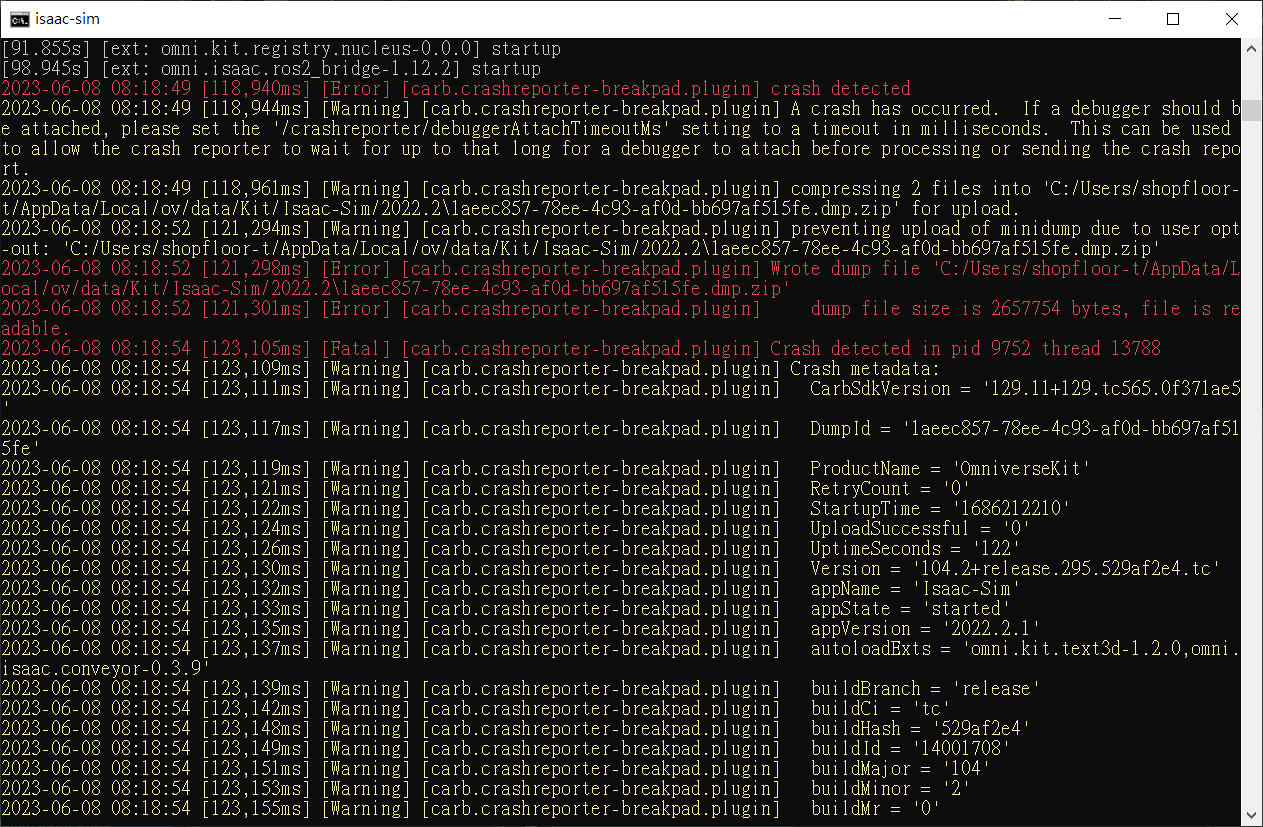
I found no matter what kind of ROS2 components I added, Isaac Sim always crash.
The following picture shows the error message!
It works on Ubuntu 18.04, but can’t run on Windows.
Hi @vic-chen - I hope this document will help clarify ROS/ROS2 support
https://docs.omniverse.nvidia.com/app_isaacsim/app_isaacsim/install_ros.html
Hi @rthaker ,
I follow the ROS install instructions, the following picture shows the ROS talker and listener seems to work. I think the ROS should be installed success. But the Isaac Sim still crashed.

The attachment is the error report.
crash_2023-06-28_13-54-16_20600.txt (8.4 KB)
The new release of Isaac sim fixed issues with ROS2 Bridge in Windows. Could you try with the new release and see if it works for you now?
This topic was automatically closed 14 days after the last reply. New replies are no longer allowed.