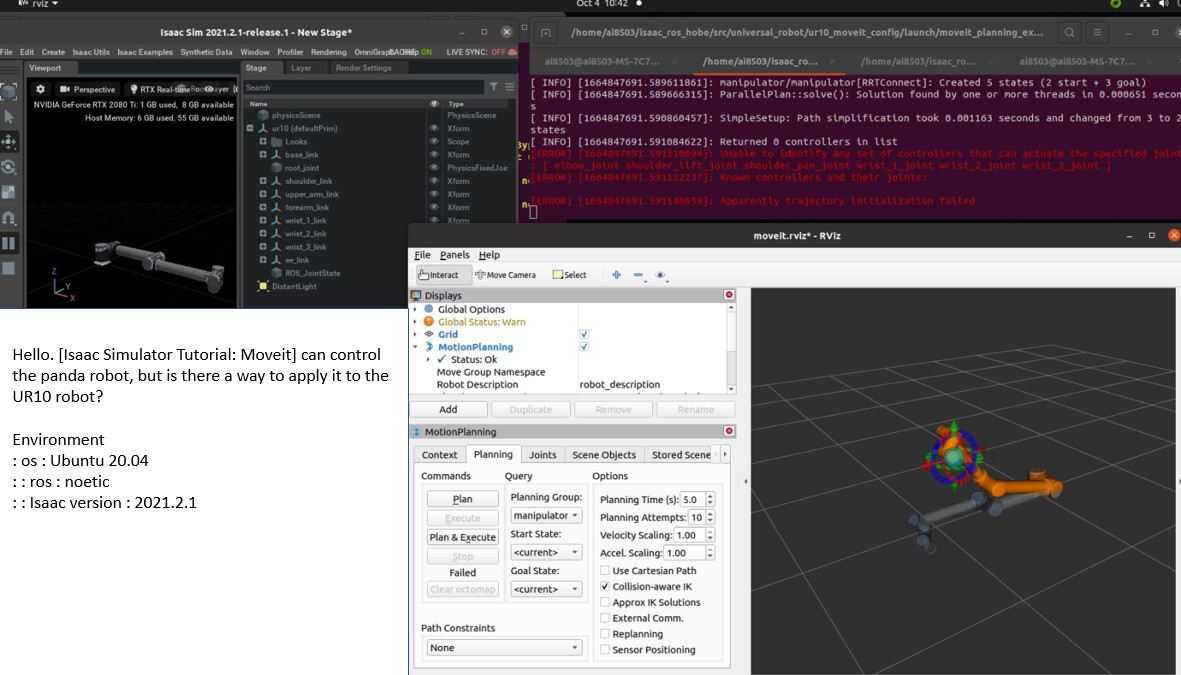
Hello. [Isaac Simulator Tutorial: Moveit] can control the panda robot, but is there a way to apply it to the UR10 robot?
Environment: os : Ubuntu 20.04: : ros : noetic: : Isaac version : 2021.2.1
Hi - Sorry for the delay in the response. Let us know if you still having this issue with the latest Isaac Sim 2022.2.1 release.