I’m trying to convert urdf file to usd file using URDF importer.
But when i clicked import button, that error was happend.
2023-04-13 11:08:55 [903,424ms] [Error] [omni.isaac.urdf] Failed to parse URDF file 'cylinder_hole.urdf'
2023-04-13 11:08:55 [903,426ms] [Warning] [omni.isaac.urdf] Cannot add robot to stage, number of links is zero
2023-04-13 11:08:56 [903,428ms] [Error] [omni.ui.python] RuntimeError: Accessed invalid null prim
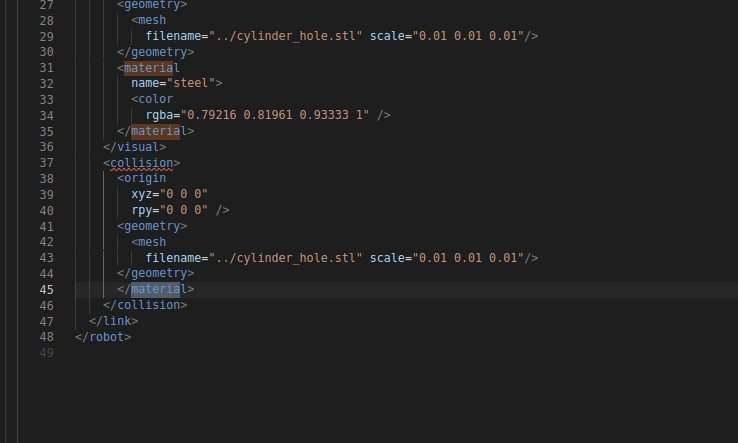
When i removed collision properties, it worked well.
I uploaded urdf file and visual/collision mesh.
Thank you
cylinder_hole.stl (42.1 KB)
cylinder_hole.urdf (1.2 KB)