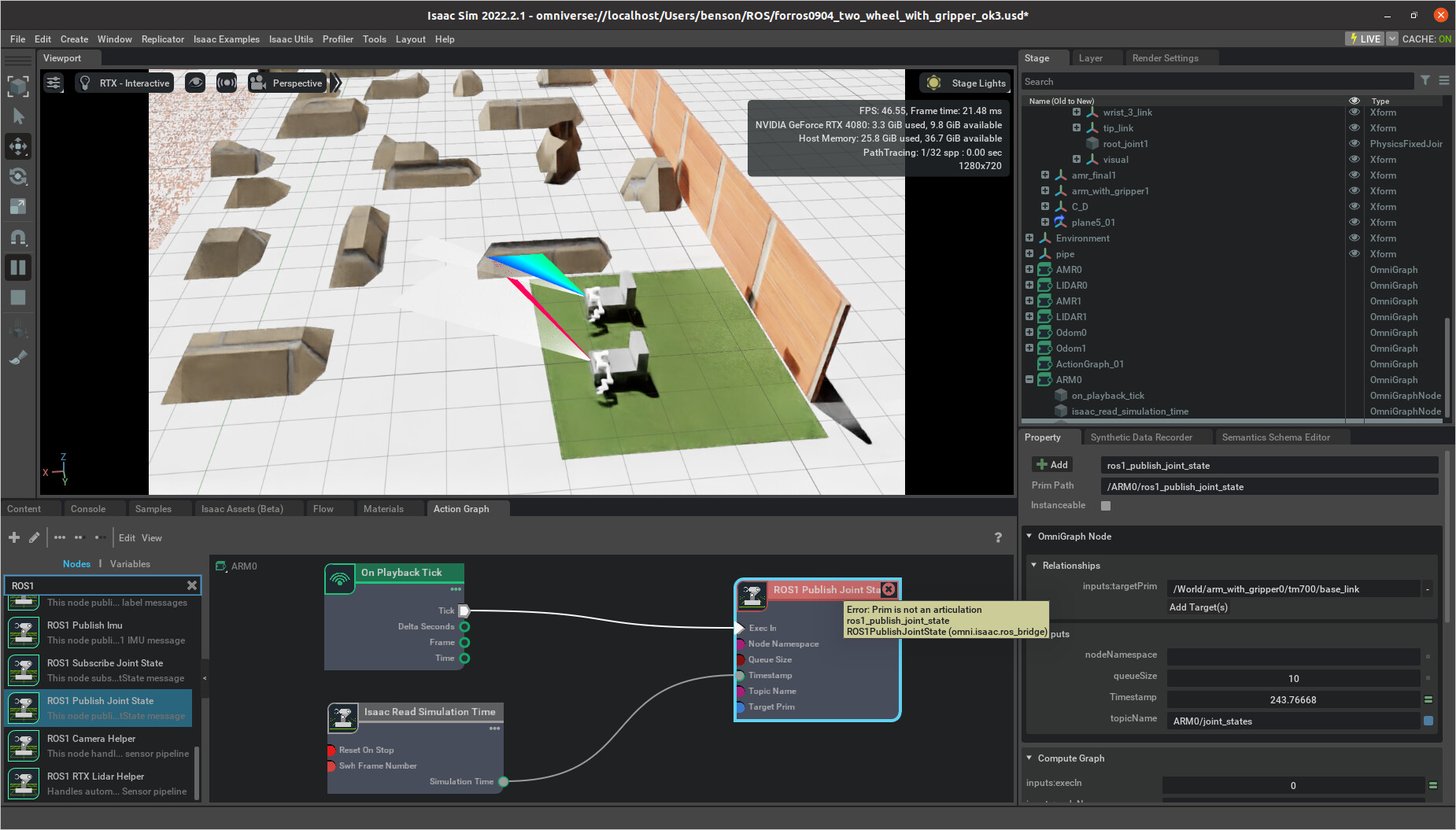
i have create articulation root for my mobile robot but it has a error :Prim is not an articulation. how can i fix it , by the way is i select the the AMR’s as Prim instead of ARM’s prim It can work,but the joint_state pubilsh will let the robot stop until shutdown the roscore.