Hi,
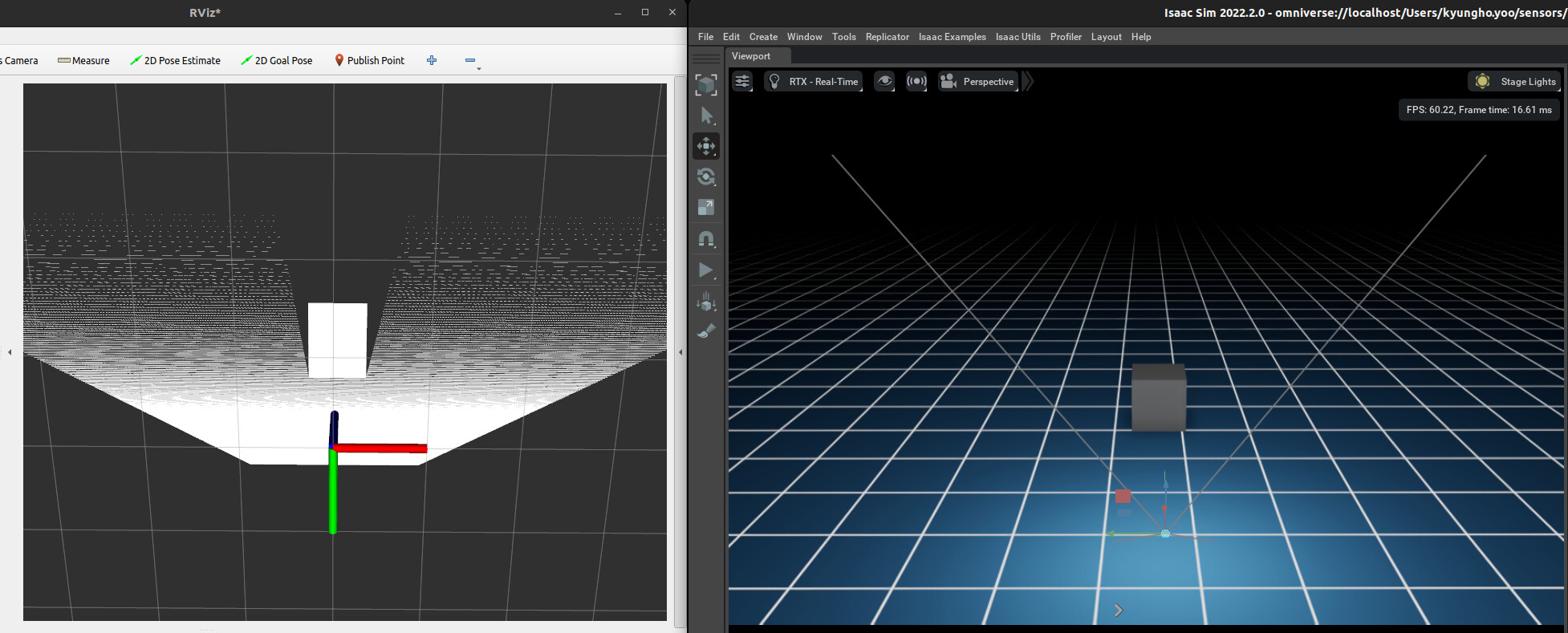
I am publishing point cloud data from Isaac Sim using the depth_pcl type. When I display this point cloud in rviz2, the point cloud is generated with camera coordinate(z-axis forward) as below:
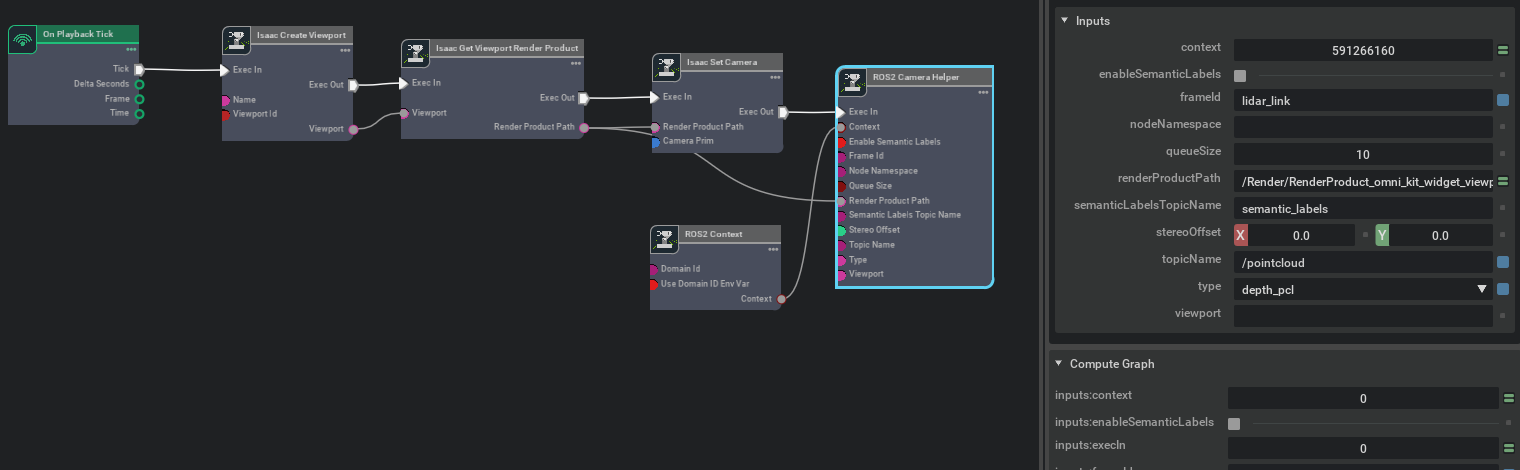
Omnigraph is configured as follows:
I can manually transform the point cloud data by fixing the SDGPipeline, but this isn’t very pleasant. Does anybody know how to deal with it?