Hello,
i’m trying to simulate a stereo camera in Isaac Sim for use with ROS. Since - as far as i know - Isaac Sim currently isn’t able to provide the needed pointcloud, i am using a ROS-package to convert the rgb and depth image to a pointcloud (via http://wiki.ros.org/depth_image_proc).
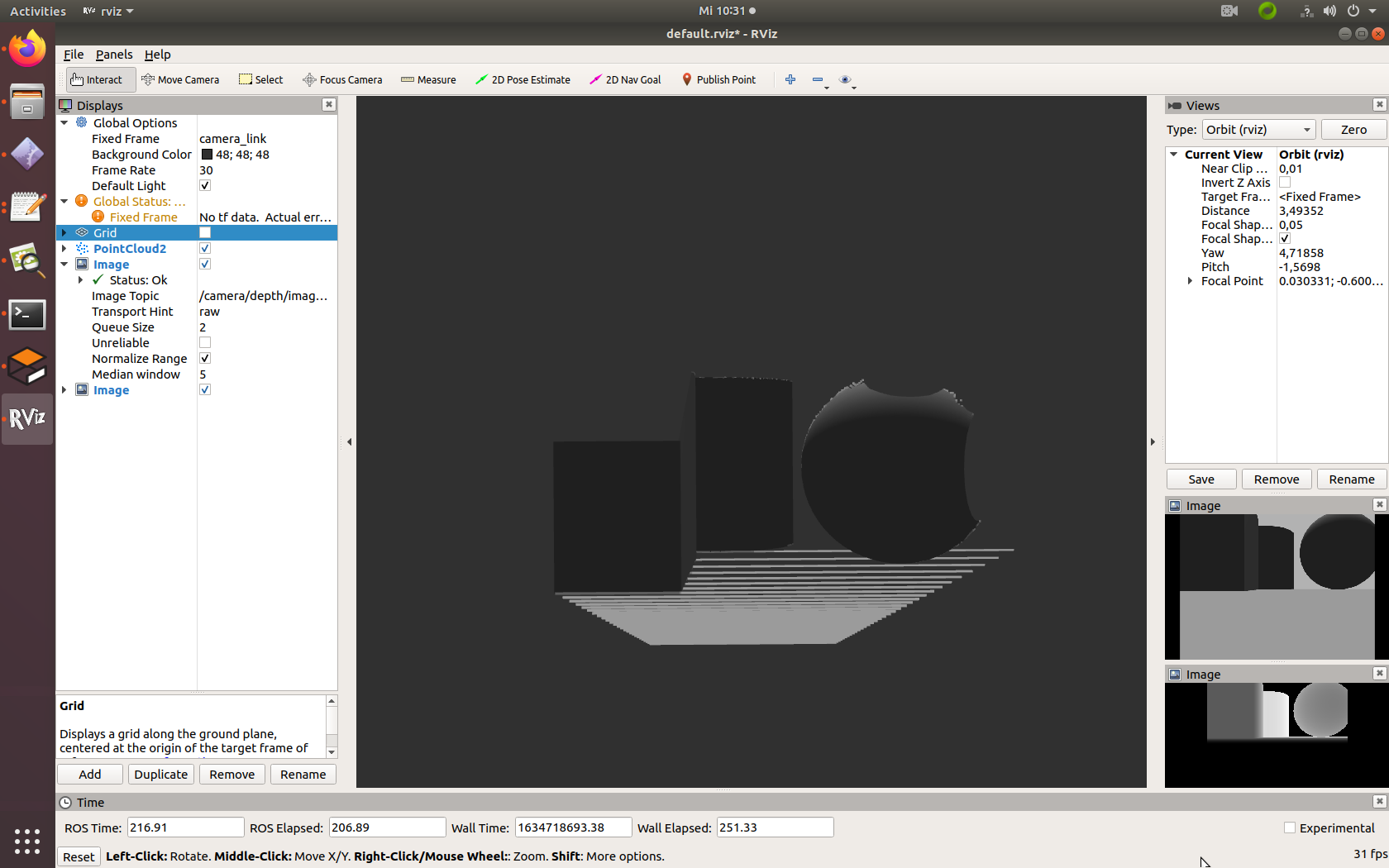
However the resulting pointcloud is somehow skewed to the right:

While the RGB and depth image are correctly displayed, the pointcloud is “leaning” to the right (can e.g. be seen with the line on the floor).
This problem exists only when using Isaac Sim, i did a quick test in Gazebo where it works fine:
Therefore it somehow has to be caused by Isaac Sim.
Is this a known bug and are there any fixes to this? I could imagine that the /camera_info published by Isaac Sim is wrong.
Thanks for your help and let me know if you need any additional files or information!