Can someone tell how to configure the action graph to put out PointCloud data .
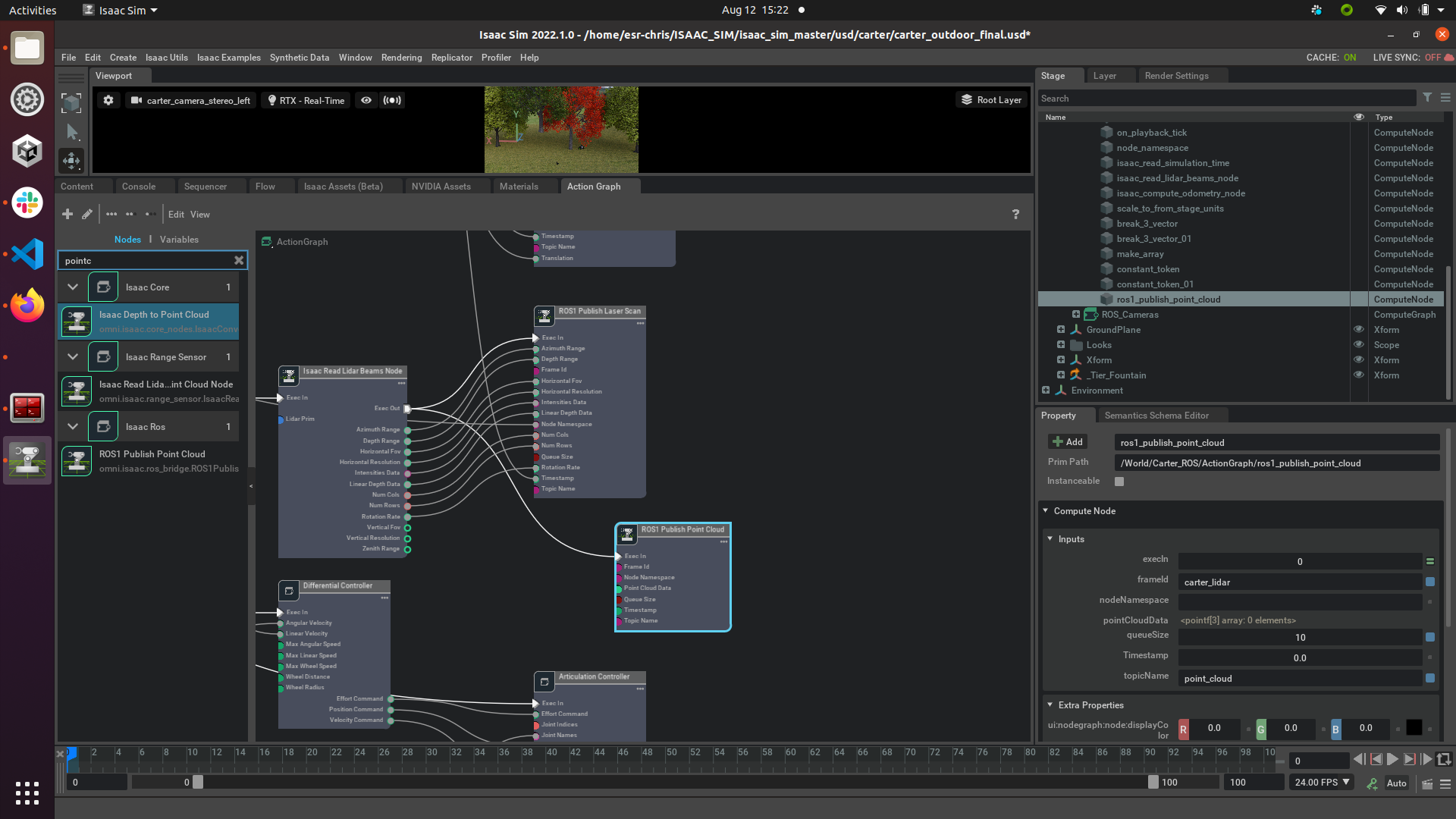
I am a bit confused about where the pointcloud_data field should be piped from . Should there be an intermediate node that will provide it?
Can someone tell how to configure the action graph to put out PointCloud data .
Hi @christhaliyath,
You can search for Isaac Read Lidar Point Cloud which will output the point cloud data that you can feed into the ROS Publish Point Cloud node. Similar to the Isaac Read Lidar Beams node, you would need to select the lidar prim by clicking “Add Target” at the lidarPrim input.
Hope that helps!
Thank you @Ayush_G
Yes i got the answer somehow .
This topic was automatically closed 14 days after the last reply. New replies are no longer allowed.